
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для того чтобы можно было избирательно регулировать амплитуды кубичной, квадратичной и линейной составляющих компенсирующего тока, выходное напряжение преобразователя «ток-напряжение» подается на дифференциатор, содержащий три последовательно включенных дифференцирующих RC-звена: конденсатор 9 и резистор 10, конденсатор 11 и резистор 12, конденсатор 13 и резистор 14. Выходы каскадов дифференциатора и преобразователя «ток-напряжение» подключены к входам нуль-индикатора (НИ) 15. Работа НИ и генератора 1 импульсов синхронизируется устройством управления 16 (УУ). На выходе третьего каскада дифференциатора формируется и поступает на первый вход нуль-индикатора 15 постоянное напряжение, пропорциональное разности амплитуд кубичных составляющих токов измеряемой RLC цепи 2, двухполюсника 17 и тока через резистор 25. Компенсация кубической составляющей осуществляется путем приведения к нулю выходного напряжения третьего RC-звена путем регулирования сопротивления R25 резистора 25 при выбранной величине сопротивления R21 резистора 21.
Затем анализируют напряжение на выходе второго RC-звена дифференциатора, пропорциональное разности амплитуд квадратичных составляющих токов двухполюсников 2 и 17, которое подается на второй вход НИ. Компенсация квадратичной составляющей осуществляется приведением к нулю выходного напряжения второго RC-звена путем регулирования емкости конденсатора 18 при фиксированной индуктивности катушки 22, либо регулировкой индуктивности катушки 22 при фиксированной емкости конденсатора 18.
После этого анализируют напряжение на выходе первого дифференцирующего RC-звена, пропорциональное разности амплитуд линейных составляющих тока двухполюсника 2 и компенсирующего сигнала, которое подается на третий вход НИ. Компенсация линейной составляющей тока осуществляется приведением к нулю выходного напряжения первого RC-звена путем регулирования сопротивления резистора 19 при фиксированном сопротивлении резистора 23 или регулировкой сопротивления резистора 23 при фиксированном сопротивлении резистора 19.
И, наконец, для компенсации постоянной составляющей импульса тока измеряемого двухполюсника 2 приводят к нулю выходное напряжение преобразователя «ток-напряжение», которое подается на четвертый вход нуль-индикатора, регулируя емкость конденсатора 20 при фиксированной индуктивности катушки 24, либо регулировкой индуктивности катушки 24 при фиксированной емкости конденсатора 20.
После четырех этапов уравновешивания тока ![]() двухполюсника 2 и компенсирующего тока двухполюсника 17 вычисляют параметры элементов измеряемой двухполюсной RLC цепи: сопротивление R3, емкость С4, сопротивление R5 и индуктивность L6 соответственно.
двухполюсника 2 и компенсирующего тока двухполюсника 17 вычисляют параметры элементов измеряемой двухполюсной RLC цепи: сопротивление R3, емкость С4, сопротивление R5 и индуктивность L6 соответственно.
Рассмотрим результаты измерения элементов двухполюсника R3C4R5L6 при следующих значениях его параметров: R3 = 1 кОм, C4 = 10 нФ, R5 = 4 кОм, L6 = 20 мГн. Измерения проводились путем схемотехнического моделирования. На 1-м этапе выбираем R21 = 1 кОм и уравновешиваем кубическую составляющую тока при R25 = 0,5 кОм. Вычисляем сопротивление резистора 3:
 1 кОм.
1 кОм.
На 2-м этапе выбираем L22 = 25 мГн и уравновешиваем квадратичную составляющую тока при С18 = 15 нФ. Вычисляем емкость конденсатора 4:
 10 нФ.
10 нФ.
На 3-м этапе выбираем R23 = 1 кОм и уравновешиваем линейную составляющую тока при R19 = 3,7777… кОм. Вычисляем сопротивление резистора 5:
 3,99995 кОм.
3,99995 кОм.
На 4-м этапе выбираем L24 = 25 мГн и уравновешиваем постоянную составляющую тока при С20 = 4,9697 нФ. Вычисляем индуктивность катушки 6:
 20,0067 мГн.
20,0067 мГн.
Как видно из полученных результатов измерений, все искомые значения определены с высокой точностью.
Так как оба двухполюсника: и измеряемая RLC цепь 2 и ПЧНД 17, – виртуально «заземлены» и находятся в равных условиях, их токи определяются только напряжением генератора 1 и параметрами проводимости двухполюсников, т. е. отсутствует влияние измерительной схемы на параметры схемы замещения объекта измерения и двухполюсника с регулируемыми элементами. На входе операционного усилителя 7 в преобразователе «ток-напряжение» отсутствует синфазное напряжение, таким образом, устраняется и второй источник погрешности измерений, свойственный мостовым цепям.
Выводы:
Частотно-независимые двухполюсные цепи обладают не только особыми частотными характеристиками, но и замечательными, полезными для практического применения временными свойствами. При настройке ДП на режим частотной независимости только Z?параметр и Y?параметр с нулевым индексом отличны от нуля, остальные обобщенные параметры равны нулю.
Метод обобщенных параметров позволяет упростить процедуру построения ЧНДП: схема должна содержать, по крайней мере, два последовательно или параллельно соединенных двухполюсника, у которых в каждом индексе имеются разнополярные обобщенные параметры.
ЧНДП позволяют реализовать различные варианты преобразователей параметров с уравновешиванием напряжений или токов, причем применяется как раздельное включение ЧНДП и ДП объекта измерения, так и объединение указанных двухполюсников в одну ветвь.
Математические модели преобразователей с применением ЧНДП имеют более простой вид по сравнению с известными моделями для широкого круга многоэлементных датчиков.
4. ЭКСПЕРИМЕНТЫ И АНАЛИЗ ПОГРЕШНОСТИ
4.1. Примеры экспериментов и вычислений
Идентификация пассивных двухполюсников с коротким замыканием между полюсами на постоянном токе
В данной главе приведены результаты практической реализации устройств параметрической идентификации многоэлементных ДП. Главное внимание уделено алгоритмам с уравновешиванием сигналов цепи с исследуемым датчиком и вспомогательной цепи, содержащей двухполюсник с регулируемыми элементами, а также алгоритмам с компенсацией составляющих сигнала датчика. Основная задача – модернизация алгоритмов и устройств преобразования параметров двухполюсных RLC-цепей с целью расширения класса объектов измерения, в частности, двухполюсников с нулевым и бесконечным сопротивлением по постоянному току.
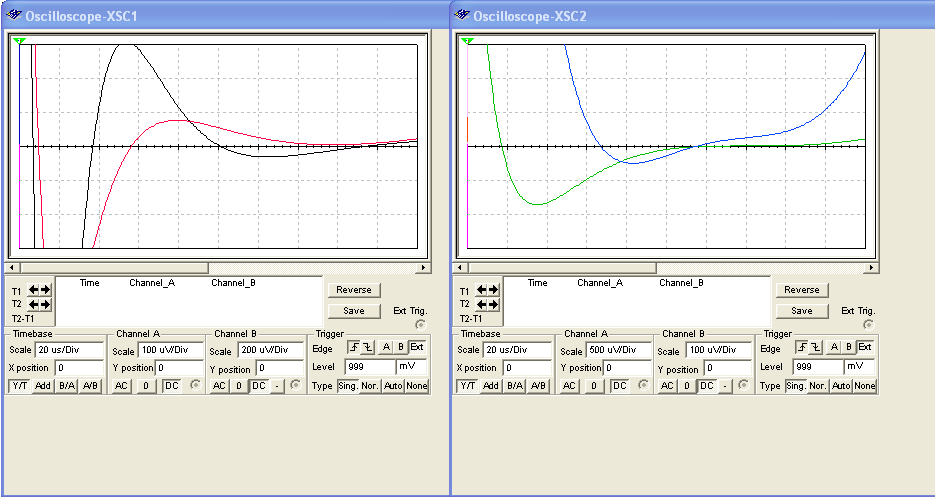
В научной работе представлены различные примеры схем и принцип работы уравновешивания, компенсации сигналов, а также примеры схем при коротком замыкании и разрыве цепи. Присутствуют доказательства работоспособности представленных схем в виде данных осциллографов.
-
+
-
+
Рис.4.3. Алгоритм работы устройства преобразования параметров многоэлементных RLC-цепей с разрывом цепи или коротким замыканием на постоянном токе

4.4. Схема измерения параметров датчика с коротким замыканием между полюсами
Выходные данные осциллографа:
4.2.1) Расчет данных и измерение погрешностей.
Приведен пример нахождения Y - параметров в схеме с четырехэлементным датчиком с коротким замыканием на постоянном токе
Комплексная проводимость RLC двухполюсника в операторной форме имеет вид

Если оператор 1/р рассматривать как символ интегрирования, то остальную часть формулы можно принять за операторное выражение сопротивления двухполюсника:
 .
.

tи = 200 мкс Т1 = 100 Т2 = 50 Т3 = 33.33
R1 = 8 КОм, R2 = 16 КОм, C1 =2 нФ,
L1 = 50 mH
Обобщенные параметры проводимости равны

Y–1 = 0,02 Y0 = 0,125 Y1 = 2 Y2 = – 64
По окончании переходного процесса в двухполюснике установится ток iдп(t), который содержит четыре импульса тока, имеющих форму степенных функций с показателями степени от 3 до 0:

Находим значения Y-параметров, через формулы:


Можно судить, что через известные Y-параметры можно находить значения резисторов уравновешивания.
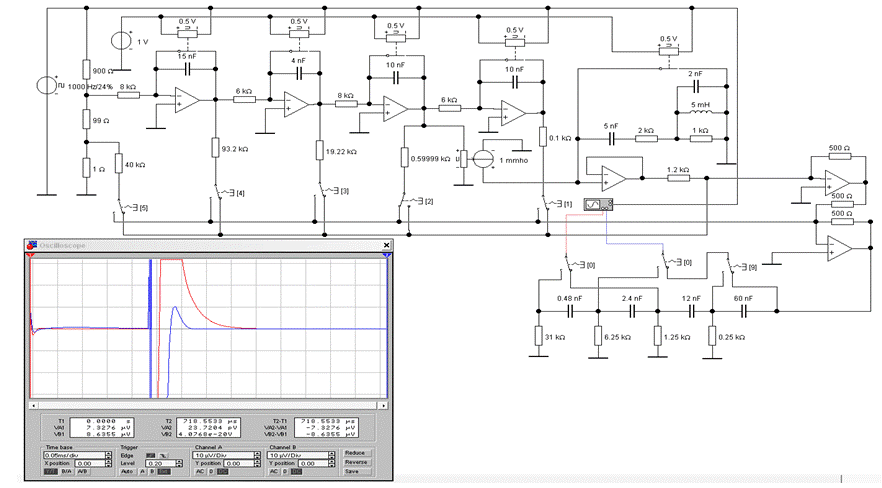
Рис. 4.5. Измеритель Z-параметров пятиэлементного RLC-двухполюсника с разрывом цепи постоянного тока
4.2.2) Линейка интеграторов на ОУ1-ОУ4 используется для получения импульсов напряжений вида степенной функции с показателями степени от 1 до 4.
Постоянные времени интеграторов равны:
![]()
![]()
![]()
![]()
Импульс тока третьей степени формируется из напряжения третьего интегратора.

Импульсы тока создают на МДП напряжение, которое содержит кроме импульсов со степенями от n до 0, составляющую n+1 (4-й) степени.
Операторное выражение комплексного сопротивления имеет следующий вид:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
