


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Положение сечения S в плоскости Оху определяется, очевидно, положением какого-нибудь проведенного в этом сечении отрезка АВ (рис. 47). В свою очередь, положение отрезка АВ можно определить, зная координаты xA, yA точки A и угол j, который отрезок АВ образует с осью х.
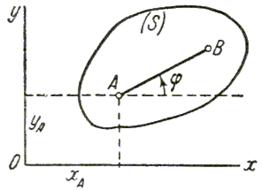
Рис. 47
Точку А, выбранную для определения положения сечения S, будем в дальнейшем называть полюсом.
При движении тела величины xA, yA и j будут изменяться. Чтобы знать закон движения тела, то есть знать его положение в пространстве в любой момент времени, надо знать зависимости:
xA=f1(t), yA=f2(t), j A=f3(t). (80)
Уравнения (80), определяющие закон происходящего движения, называются уравнениями плоскопараллельного движения твердого тела. Покажем, что плоское движение слагается из поступательного и вращательного. Для этого рассмотрим два последовательных положения I и II, которые занимает сечение S движущегося тела в моменты времени t1 и t2=t1+D t (рис. 48). Легко видеть, что сечение S, а с ним и все тело, можно привести из положения I в положение II следующим образом. Переместим сначала тело поступательно, так, чтобы полюс А, двигаясь вдоль своей траектории, пришел в положение А2 (при этом отрезок A1B1 займет положение А2 В1’), а затем повернем сечение вокруг полюса A2 на угол D j 1. Таким же путем можно переместить тело из положения II в следующее его положение III и т. д. Отсюда заключаем, что плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся так же, как полюс А, и из вращательного движения вокруг этого полюса.
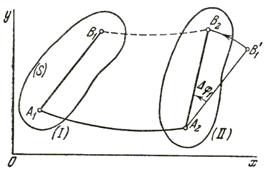
Рис. 48
Основными кинематическими характеристиками рассматриваемого движения являются скорость и ускорение поступательного движения, равные скорости и ускорению полюса (Vпост=VA, aпост=aA), а также угловая скорость w и угловое ускорение e вращательного движения вокруг полюса. Значения этих характеристик в любой момент времени t можно найти по уравнениям (80).
При изучении движения можно в качестве полюса выбирать любую точку тела. Рассмотрим, что получится, если вместо А выбрать в качестве полюса какую-нибудь точку С и определять положение сечения отрезком CD, образующим с осью Ох угол j. Характеристики поступательной части движения при этом, очевидно, изменятся, так как в общем случае VC ¹ VA и aC ¹ aA (иначе движение тела было бы поступательным). Характеристики же вращательной части движения, то есть w и e, остаются неизменными. В самом деле, проведя из С прямую CB1, параллельную АВ, мы видим, что в любой момент времени угол j 1=j - a, где a = const. Отсюда:
dj 1/dt=dj /dt, d2j 1/dt2=d2j /dt2,
или
w 1=w, e 1=e.
Следовательно, вращательная часть движения от выбора полюса не зависит.
§ 41. Определение траекторий точек тела
Рассмотрим точку М тела, положение которой в сечении S определяется расстоянием b=AM от полюса А и углом BAM = a (рис. 49). Если движение тела задано уравнениями (80), то координаты х и у точки М в осях Оху будут:
x=xA+bcos(j + a), (81)
y=yA+bsin(j + a). (82).
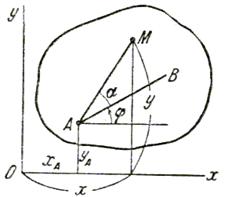
Рис. 49
Равенства, определяющие закон движения точки М в плоскости Оху, дают одновременно уравнение траектории этой точки в параметрическом виде. Обычное уравнение траектории получим, исключив из системы время t.
Если рассматриваемое тело является звеном какого-нибудь механизма, то для определения траектории любой точки М тела достаточно выразить ее координаты через какой-нибудь параметр, определяющий положение механизма, а затем исключить этот параметр. Уравнения движения (80) при этом знать не обязательно.
§ 42. Определение скоростей точек тела
Плоскопараллельное движение твердого тела слагается из поступательного движения, при котором все точки тела движутся со скоростью полюса VA, и из вращательного движения вокруг этого полюса. Покажем, что скорость любой точки М тела складывается геометрически из скоростей, которые она получает в каждом из этих движений.
В самом деле, положение любой точки М, лежащей в сечении (S) тела, определяется по отношению к осям Оху радиусом-вектором r=rA+r' (рис. 50), где rA – радиус-вектор полюса A, r'= AM – вектор, определяющий положение точки М относительно осей Ax'y', перемещающихся вместе с полюсом А поступательно (движение сечения (S) по отношению к этим осям представляет собою вращение вокруг полюса А). Тогда
VM=dr/dt=drA/dt+dr’/dt.
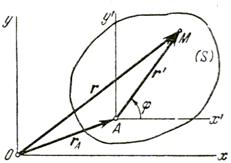
Рис. 50
В полученном равенстве величина drA/dt = VA есть скорость полюса А; величина же dr'/dt равна скорости VMA, которую точка М получает при rA= const, то есть относительно осей Ax'y' или, иначе говоря, при вращении тела вокруг полюса А.
Таким образом, из предыдущего равенства действительно следует, что
VM=VA+VMA. (83)
При этом скорость VMA точки М во вращательном движении вокруг полюса A будет:
VMA=w ×MA (VMA^ MA), (84)
где w – угловая скорость вращения тела.
Таким образом, скорость любой точки М тела геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости точки М в ее вращении вместе с телом вокруг этого полюса.
§ 43. Теорема о проекциях скоростей двух точек тела
Проекции скоростей двух точек твердого тела на прямую, соединяющую эти точки, равны друг другу.
Рассмотрим какие-нибудь две точки А и В тела. Принимая точку А за полюс (рис. 51), получаем, что VB=VA+VBA. Отсюда, проектируя обе части равенства на линию АВ и учитывая, что вектор VBA перпендикулярен к АВ, находим:
VBcosb =VAcosa (85)
и теорема доказана. Этот результат позволяет легко находить скорость данной точки тела, если известны направление движения этой точки и скорость какой-нибудь другой точки того же тела.
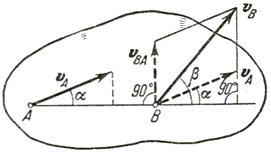
Рис. 51
§ 44. Определение скоростей точек тела с помощью мгновенного центра скоростей
Мгновенным центром скоростей называется точка сечения S тела, скорость которой в данный момент времени равна нулю. Легко убедиться, что если тело движется не поступательно, то такая точка в каждый момент времени t существует и притом единственная. Пусть в момент времени t точки A и В тела, лежащие в сечении S, имеют скорости VA и VB, не параллельные друг другу (рис. 52). Тогда точка, лежащая на пересечении перпендикуляров Аа к вектору VA и Bb к вектору VB, и будет мгновенным центром скоростей, так как Vp=0. В самом деле, если допустить, что Vp ¹ 0, то по теореме о проекциях скоростей точек тела вектор Vp должен быть одновременно перпендикулярен и к АР (так как VA^ AP) и к BP (так как VB^ BP), что невозможно. Из той же теоремы видно, что никакая другая точка сечения S в этот момент времени не может иметь скорость, равную нулю.
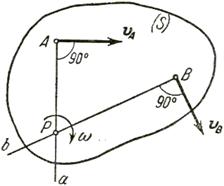
Рис. 52
Если теперь в момент времени t взять точку Р за полюс, то по формуле (85) скорость точки А будет равна
VA=VP +VAP =VAP,
так как VP=0. Аналогичный результат получается для любой другой точки тела. Следовательно, скорость любой точки тела, лежащей в сечении S, равна ее вращательной скорости вокруг мгновенного центра скоростей Р. При этом согласно соотношениям (85)
VA=w ×PA (VA^ PA);
VB=w ×PB (VA^ PB). (86)
Из равенств (86) следует также, что
VA /PA=VB /PB, (87)
то есть что скорости точек тела пропорциональны их расстояниям до мгновенного центра скоростей.
Полученные результаты приводят к следующим выводам.
1) Для определения мгновенного центра скоростей надо знать только направления скоростей VA и VB каких-нибудь двух точек A и B сечения тела (или траектории этих точек); мгновенный центр скоростей находится в точке пересечения перпендикуляров, восстановленных из точек A и B к скоростям этих точек (или к касательным к траекториям).
2) Для определения скорости любой точки тела надо знать модуль и направление скорости какой-нибудь одной точки А тела и направление скорости другой его точки В. Тогда, восстановив из точек А и В перпендикуляры к VA и VB, мы построим мгновенный центр скоростей Р и по направлению VA определим направление поворота тела. После этого, зная VA, найдем по формуле (89) скорость VM любой точки М тела. Направлен вектор VM перпендикулярно РМ в сторону поворота тела.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
