


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
x=4t; у= 16t2 – 1; (1)
f1 == 0,5 (х и у – в см, t и t1 – в с).
Решение. Уравнения движения (1) можно рассматривать как параметрические уравнения траектории точки. Чтобы получить уравнения траектории в координатной форме, исключим время t из уравнений (1).
Получаем у= х2- 1, то есть траекторией точки является парабола, показанная на рис. 13.
Вектор скорости точки
V=Vxi+Vyj. (2)
Вектор ускорения
a=axi+ayj.
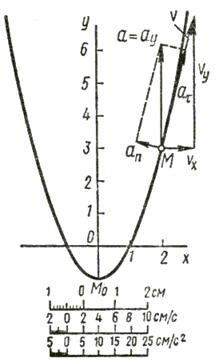
Рис. 13
Здесь i, j – орты осей х и у;Vx, Vy, ax, ay – проекции скорости и ускорения точки на оси координат.
Найдем их, дифференцируя по времени уравнения движения (1):
Vx=x'=4 см/с; ax=x''=0; (3)
Vy=y'=32t; ay=y''=32 см/с2.
По найденным проекциям определяются модуль скорости:
 (4)
(4)
и модуль ускорения точки:
 . (5)
. (5)
Модуль касательного ускорения точки
at =|dV/dt|, (6)
или
at =|V× a/V|; (6')
at =|(Vxax+Vyay)/V|. (6'')
Здесь dV/dt выражает проекцию ускорения точки на направление ее скорости. Знак «+» при dV/dt означает, что движение точки ускоренное, направления at и v совпадают; знак «-» – что движение замедленное.
Модуль нормального ускорения точки
an=V2/r. (7)
Если радиус кривизны траектории r в рассматриваемой точке неизвестен, то an можно определить по формуле
an =|V ´ a|/V. (8)
При движении точки в плоскости формула (8) принимает вид
an =|Vxay+Vyax|/V. (8')
Модуль нормального ускорения можно определить и следующим образом:
 . (9)
. (9)
После того как найдено нормальное ускорение по формулам (8) или (9), радиус кривизны траектории в рассматриваемой точке определяется из выражения
r =V2/an. (10)
Результаты вычислений по формулам (3)-(6), (8) и (10) для заданного момента времени t1=0,5 с приведены в табл. 6.
Таблица 6
Координаты, см | Скорость, см/с | Ускорение, см/с2 | Радиус кривизны, см | |||||||
x | y | Vx | Vy | V | ax | ay | a | at | an | r |
2,0 | 3,0 | 4,0 | 16,0 | 16,5 | 0 | 32,0 | 32,0 | 31,0 | 7,8 | 35,0 |
На рис. 13 показано положение точки М в заданный момент времени. Вектор V строим по составляющим vx и vy, причем этот вектор должен по направлению совпадать с касательной к траектории. Вектор a строим по составляющим ax и ay и затем раскладываем на составляющие at и an. Совпадение величин at и an, найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
Задание К2. Кинематический анализ плоского механизма
Найти для заданного положения механизма скорости и ускорения точек В и С, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат. Схемы механизмов помещены на рис. 16, а необходимые для расчёта данные приведены в табл. 7.
Таблица 7
Номер | Размеры, см | wоA, рад/с | wI, рад/с | eОА, рад/с2 | VA, см/с | aA, см/с2 | |||
OA | r | AB | AC | ||||||
1 | 40 | 15 | – | 8 | 2 | – | 2 | – | – |
2 | 30 | 15 | – | 8 | 3 | – | 2 | – | – |
3 | – | 50 | – | – | – | – | – | 50 | 100 |
4 | 35 | – | – | 45 | 4 | – | 8 | – | – |
5 | 25 | – | – | 20 | 1 | – | 1 | – | – |
6 | 40 | 15 | – | 6 | 1 | 1 | 0 | – | – |
7 | 35 | – | 75 | 60 | 5 | – | 10 | – | – |
8 | – | – | 20 | 10 | – | – | – | 40 | 20 |
9 | – | – | 45 | 30 | – | – | – | 20 | 10 |
10 | 25 | – | 80 | 20 | 1 | – | 2 | – | – |
Пример выполнения задания. Дано: схема механизма в заданном положении (рис. 14); исходные данные (табл. 8).
Таблица 8
Размеры, см | w ОА, рад/с | eОА, рад/с2 | ||
ОA | AB | AC | ||
10 | 60 | 20 | 1,5 | 2 |
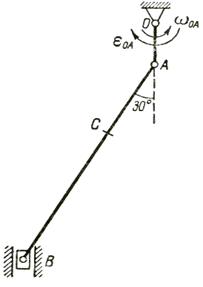
Рис. 14
Решение. 1. Определение скоростей точек и угловой скорости звена (рис. 15). Вычисляем модуль скорости пальца А кривошипа ОА при заданном положении механизма:
VA=w OA× OA.
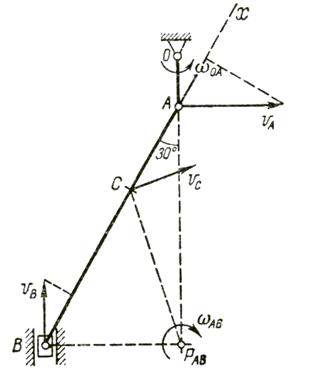
Рис. 15
Скорость точки А перпендикулярна кривошипу ОА. Скорость ползуна В направлена по вертикали. Мгновенный центр скоростей РAB шатуна АВ находится в точке пересечения перпендикуляров, проведенных из точек А и В к их скоростям.
Угловая скорость звена АВ
w AB=VA /APAB.
Модули скоростей точек В и С
VB =w AB×BPAB; VC =w AB×CPAB .
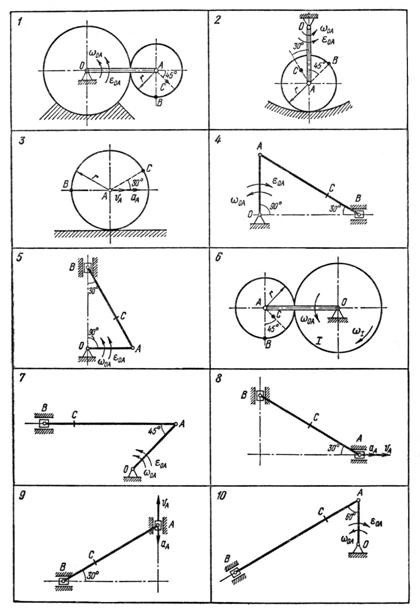
Рис. 16
Расстояния АРAB, ВРAB и СРAB определяются из рассмотрения треугольников ABPAB и ACPAB:
АРAB = 52,0 см; ВРAB = 30,0 см; СРAB = 36,1 см.
В соответствии с этим VA = 15,0 см/с; wAB = 0,29 рад/с;
VB = 8,7 см/с; VC = 10,5 см/с.
Вектор VC направлен перпендикулярно отрезку СРAB в сторону, соответствующую направлению вращения звена АВ.
Для проверки определим скорость точки В другим способом. Воспользуемся теоремой о равенстве проекции скоростей точек на ось, проведенную через эти точки.
Направим ось х вдоль шатуна АВ в направлении от В к А. Имеем VAcos(VA, x)=VBcos(VB, x), или, как видно из рис. 2,
VA cos60° = VB cos 30°.
Отсюда
VB = 8,7 см.
Полезно убедиться, что и найденная ранее скорость точки С удовлетворяет этой теореме.
2. Определение ускорений точек и углового ускорения звена (рис. 17). Ускорение точки А складывается из вращательного и центростремителького ускорений:
aA=aBA+aЦА; aBA=e ОА×OA; aЦА=w 2ОА×OA.
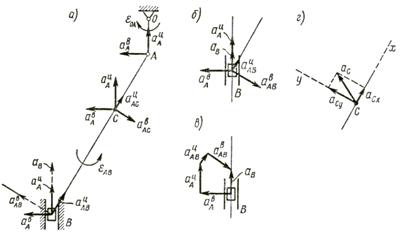
Рис. 17
Согласно теореме об ускорениях точек плоской фигуры
aB=aA+aBAB+aЦАВ,
или
aB=aA+aЦA+aBAB+aЦAB. (1)
Центростремительное ускорение точки В во вращательном движении шатуна АВ вокруг полюса А
аЦAB=w 2AB×AB.
По приведенным формулам вычисляем:
aBA= 20,0 см/с2; аЦА= 22,5 см/с2; аЦАВ= 5,0 см/с2.
Вектор аЦА направлен от А к О. Вектор aBA перпендикулярен вектору аЦА и направлен противоположно vА (вращение кривошипа ОА – замедленное).
Вектор аЦАB направлен от B к А. Что касается ускорения aB точки В и вращательного ускорения aBAB, то известны только линии действия этих векторов: аB – по вертикали вдоль направляющих ползуна, аBАB – перпендикулярно АВ.
Зададимся произвольно их направлениями по указанным линиям (рис. 17, a). Эти ускорения определим из уравнений проекций векторного равенства (1) на оси координат. Знак в ответе показывает, соответствует ли истинное направление вектора принятому при расчете.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
