


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 . (1)
. (1)
Найдем зависимость между возможными перемещениями точек системы. Поскольку нить, к которой привязан груз Q, нерастяжима и скольжение между нитью и валом 1 отсутствует, перемещение груза Q равно перемещению точки обода колеса 1. Поэтому угол поворота вала 1 и шестерни 2 равен
![]() .
.

Рис. 24
Перемещение точки К обода колеса 2
![]() .
.
Так как скольжение между шестернями 2 и 3 отсутствует, то возможные перемещения точек касания этих шестерен равны и угол поворота шестерни 3
 .
.
Перемещение точки А кривошипа, жестко соединенного с колесом,
![]() .
.
Для определения зависимости между возможными перемещениями dsA и dsB найдем положение мгновенного центра вращения звена АВ – точки Р.
Тогда
 ;
; ![]() .
.
Из DAPB
 .
.
Теперь
 .
.
Сила упругости пружины пропорциональна ее деформации: F = ch. Подставив в уравнение работ (1) выражения силы упругости и возможных перемещений точек системы, получим
 ,
,
откуда
![]() ;
;  .
.
Следовательно, пружина сжата на 1,74 см.
Таблица 11
Номер варианта | Линейные размеры | Силы, Н | Момент пары сил М, Н×м | Коэффициент жесткости c, Н/см | Деформация пружины h, см | Величины, подлежащие определению | Примечания | |
Q | P | |||||||
1 | ОА=10 см | – | – | 20 | – | – | P | |
2 | О1А=20 см | – | 100 | – | – | – | M | |
3 | r1=15 см, r2=30 см | – | – | 100 | – | – | Q | |
4 | ОС:OA=4:5 | – | 200 | – | – | 4 | c | |
5 | OA=100 см | – | – | 10 | – | – | P | |
6 | r1=15 см, r2=50 см, r3=20 см, O1A=80 см | 200 | – | – | – | – | P | Вес рукояти О1А не учитывать |
7 | OC=OA | – | – | – | 10 | 3 | P | Пружина сжата |
8 | OC=AC | – | 200 | – | 10 | 2 | Q | то же |
9 | OA=20 см | 200 | – | – | – | – | M | |
10 | r1=15 см, r2=40 см, r3=20 см, OA=100 см | 2000 | – | – | – | 4 | c | Вес рукояти ОА не учитывать |
Задание Д 4. Применение общего уравнения динамики
к исследованию движения механической системы
с одной степенью свободы
Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Варианты механических систем показаны на рис. 27, а необходимые для решения данные приведены в табл. 12.
Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами.
Пример выполнения задания. Дано: G1 = G2 = 2G; G3 = G4 = G;
R = 2r; i2 x = r![]() ; f = 0,2.
; f = 0,2.
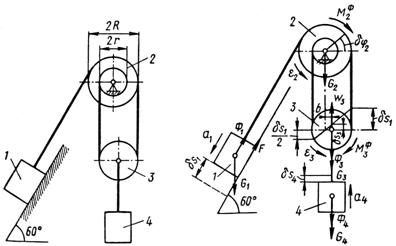
Рис. 25 Рис. 26
Блок 3 – сплошной однородный цилиндр (рис. 25). Определить ускорения грузов 1 и 4 и натяжения ветвей нити 1-2 и 3-4.
Решение. Применим к решению задания общее уравнение динамики. Так как система приходит в движение из состояния покоя, направления ускорений тел соответствуют направлениям их движения.
Ввиду того что среди сил, действующих на тела системы, есть сила трения, целесообразно по исходным данным найти истинное направление движения системы, чтобы правильно показать направление силы трения. Если направление движения системы выбрано ошибочно, то искомое ускорение получается со знаком « – ». В этом случае необходимо изменить направления силы трения и сил инерции и внести соответствующие поправки в общее уравнение динамики.
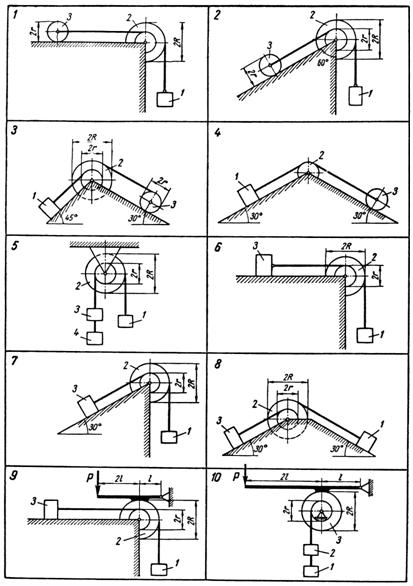
Рис. 27
В данном примере груз 1 опускается.
Покажем задаваемые силы: силы тяжести ![]() – груза 1,
– груза 1, ![]() – блока 2,
– блока 2, ![]() – блока 3 и
– блока 3 и ![]() – груза 4, а также
– груза 4, а также ![]() – силу трения скольжения груза 1 по наклонной плоскости (рис. 26).
– силу трения скольжения груза 1 по наклонной плоскости (рис. 26).
Приложим силы инерции. Сила инерции груза 1, движущегося поступательно с ускорением a1, выражается вектором
 .
.
Силы инерции блока 2, вращающегося вокруг неподвижной оси с угловым ускорением e2, приводятся к паре, момент которой равен
![]() .
.
Силы инерции блока 3, совершающего плоское движение, приводятся к вектору
![]() ,
,
где ![]() – ускорение центра масс блока 3, и к паре сил, момент которой
– ускорение центра масс блока 3, и к паре сил, момент которой
![]() ,
,
где e3 – угловое ускорение блока.
Сила инерции груза 4, движущегося поступательно с ускорением ![]() .
.
Сообщим системе возможное перемещение в направлении ее действительного движения (рис. 26) (можно сообщить возможное перемещение и в обратном направлении). Составим общее уравнение динамики:
 (1)
(1)
где ![]() и
и ![]() – углы поворотов блоков 2 и 3.
– углы поворотов блоков 2 и 3.
Зависимости между возможными перемещениями такие же, как и между соответствующими скоростями.
Таблица 12
Номер варианта | Силы тяжести | R/r | Радиусы | P | Коэффициент трения | Дополнительные данные | ||||
G1 | G2 | G3 | G4 | i2x | i3z | |||||
1 | G | G | 3G | – | 2 |
| – | – | – | |
2 | G | G | G | – | 2 |
| – | – | – | |
3 | 3G | G | G | – | 2 |
| – | – | 0,1 | |
4 | G | G | 2G | – | – | – | – | – | 0,2 | r2=r3 |
5 | 2G | G | G | G | 3 | 2r | – | – | – | |
6 | 2G | G | 2G | – | 3 | 2r | – | – | 0,2 | |
7 | 2G | G | 2G | – | 3 | 2r | – | – | 0,2 | |
8 | 2G | G | 2G | – | 3 | 2r | – | – | 0,2 | |
9 | 2G | G | 2G | – | 3 | 2r | – | 0,2G | 0,2 | |
10 | 2G | 2G | G | – | 4 | – | 2r | G/3 | 0,4 |
Выразим скорости центров масс и угловые скорости тел системы через скорость составим уравнения связей).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
