


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В правой части равенства первая сумма равна JCz, а вторая – массе тела М. Найдем значение третьей суммы. Для координат центра масс ![]() . Так как в нашем случае точка С является началом координат, то х'C= 0 и, следовательно,
. Так как в нашем случае точка С является началом координат, то х'C= 0 и, следовательно,  . Окончательно получаем:
. Окончательно получаем:
![]() . (146)
. (146)
Формула (146) выражает следующую теорему Гюйгенса: момент инерции тела относительно данной оси равен моменту инерции относительно оси, ей параллельной, проходящей через центр масс тела, сложенному с произведением массы всего тела на квадрат расстояния между осями.
Из формулы (146) следует, что  . Следовательно, из всех осей данного направления наименьший момент инерции будет относительно той оси, которая проходит через центр масс.
. Следовательно, из всех осей данного направления наименьший момент инерции будет относительно той оси, которая проходит через центр масс.
Глава 16. Теорема о движении центра масс системы
§ 64. Дифференциальные уравнения движения системы
Рассмотрим систему, состоящую из п материальных точек. Выделим какую-нибудь точку системы с массой mk. Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через ![]() , а равнодействующую всех внутренних сил – через
, а равнодействующую всех внутренних сил – через ![]() . Если точка имеет при этом ускорение ak, то по основному закону динамики
. Если точка имеет при этом ускорение ak, то по основному закону динамики
![]() .
.
Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:
(147)
Эти уравнения, из которых можно определить закон движения каждой точки системы, называются дифференциальными уравнениями движения системы в векторной форме. Уравнения (147) являются дифференциальными, так как входящие в правые части уравнений силы будут в общем случае зависеть от времени, координат точек системы и их скоростей.
Проектируя равенства (147) на какие-нибудь координатные оси, мы можем получить дифференциальные уравнения движения системы в проекциях на эти оси.
Основная роль уравнений (147) состоит в том, что они, или следствия из них, являются исходными для получения соответствующих общих теорем.
§ 65. Теорема о движении центра масс
В ряде случаев для определения характера движения системы (особенно твердого тела), достаточно знать закон движения ее центра масс. Чтобы найти этот закон, обратимся к уравнениям движения системы (147) и сложим почленно их левые и правые части. Тогда получим:
![]() . (148)
. (148)
Преобразуем левую часть равенства. Из формулы для радиуса-вектора центра масс имеем:
![]() .
.
Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем:
![]()
или
![]() , (149)
, (149)
где ![]() – ускорение центра масс системы. Так как по свойству внутренних сил системы
– ускорение центра масс системы. Так как по свойству внутренних сил системы ![]() , то, подставляя все найденные значения в равенство (148), получим окончательно:
, то, подставляя все найденные значения в равенство (148), получим окончательно:
![]() . (150)
. (150)
Уравнение (150) и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Проектируя обе части равенства (150) на координатные оси, получим:
![]() ,
,  ,
, ![]() .
.
Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
§ 66. Закон сохранения движения центра масс
Из теоремы о движении центра масс можно получить следующие важные следствия.
1) Пусть сумма внешних сил, действующих на систему, равна нулю
![]() .
.
Тогда из уравнения (150) следует, что aC=0 или VC=const. Следовательно, если сумма всех внешних сил, действующих на систему, равна нулю, то центр масс этой системы движется с постоянной по модулю и направлению скоростью, то есть равномерно и прямолинейно.
2) Пусть сумма внешних сил, действующих на систему, не равна нулю, но эти силы таковы, что сумма их проекций на какую-нибудь ось (например, ось Ох) равна нулю:
![]() .
.
Тогда уравнение (150) дает:
![]() или
или  .
.
Следовательно, если сумма проекций всех действующих внешних сил на какую-нибудь ось равна нулю, то проекция скорости центра масс системы на эту ось есть величина постоянная. В частности, если в начальный момент VCx=0, то и в любой последующий момент VCx=0 то есть центр масс системы в этом случае вдоль оси Ох перемещаться не будет (xC=const).
Все эти результаты выражают собою закон сохранения движения центра масс системы.
Глава 17. Теорема об изменении количества движения системы
§ 67. Количество движения системы
Количеством движения системы будем называть векторную величину Q, равную геометрической сумме (главному вектору) количеств движения всех точек системы (рис. 62):
![]() . (151)
. (151)
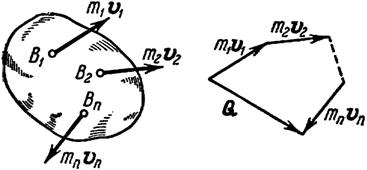
Рис. 62
Из чертежа видно, что независимо от величин скоростей точек системы (если только эти скорости не параллельны) вектор Q может принимать любые значения и даже оказаться равным нулю, когда многоугольник, построенный из векторов mkVk, замкнется. Следовательно, по величине Q нельзя полностью судить о характере движения системы.
Из равенства (151) следует, что
![]() .
.
Беря от обеих частей производную по времени, получим
![]() или
или  .
.
Отсюда находим, что
![]() , (152)
, (152)
то есть количество движения системы равно произведению массы всей системы на скорость ее центра масс.
Из формулы (152) видно, что если тело (или система) движется так, что центр масс остается неподвижным, то количество движения тела равно нулю. Если же движение тела является сложным, то величина Q не будет характеризовать вращательную часть движения вокруг центра масс. Таким образом, количество движения характеризует только поступательное движение системы. При сложном же движении величина Q характеризует только поступательную часть движения системы вместе с центром масс.
§ 68. Теорема об изменении количества движения
Рассмотрим систему, состоящую из п материальных точек. Составим для этой системы дифференциальные уравнения движения и сложим их почленно. Тогда получим:
![]() .
.
Последняя сумма по свойству внутренних сил равна нулю. Кроме того,
![]() .
.
Окончательно находим:
![]() . (153)
. (153)
Уравнение (153) выражает теорему об изменении количества движения системы в дифференциальной форме: производная по времени от количества движения системы равна геометрической сумме всех действующих на систему внешних сил. В проекциях на координатные оси будем иметь:
![]() ,
,  ,
, ![]() . (154)
. (154)
Найдем другое выражение теоремы. Пусть в момент t=0 количество движения системы равно Q0, а в момент t1 становится равным Q1. Тогда, умножая обе части равенства (153) на dt и интегрируя, получим:
или
![]() , (155)
, (155)
так как интегралы, стоящие справа, дают импульсы внешних сил.
Уравнение (155) выражает теорему об изменении количества движения системы в интегральной форме: изменение количества движения системы за некоторый промежуток времени равно сумме импульсов действующих на систему внешних сил за тот же промежуток времени.
В проекциях на координатные оси будем иметь:
 (156)
(156)
Практическая ценность теоремы состоит в том, что она позволяет исключить из рассмотрения наперед неизвестные внутренние силы (например, силы давления друг на друга частиц жидкости).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
