
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.4 Вывод разделу
Произведен расчет реакций опор для пространственной конструкции и расчет на ПЭВМ по программе SSFNP.
Результаты занесены в таблицу 9. Был произведен расчет главного вектора и главного момента.
Вывод: максимальная погрешность наших расчетов и расчетов на ПЭВМ составляет 0,47 %. Что соответствуют норме допустимой погрешности.
4 ОПРЕДЕЛЕНИЕ АБСОЛЮТНОЙ СКОРОСТИ И АБСОЛЮТНОГО
УСКОРЕНИЯ ТОЧКИ В СЛУЧАЕ ПЕРЕНОСНОГО
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Постановка задачи:
Материальная точка М движется вращательно вокруг оси АВ и, одновременно, совершает циклическое перемещение вдоль радиуса R=0,2 м (рисунок 13). Дан закон вращения вокруг оси АВ при переносном движении ![]() и закон движения вдоль радиуса R при относительном движении
и закон движения вдоль радиуса R при относительном движении ![]() . Время перемещения при переносном движении равно
. Время перемещения при переносном движении равно ![]() материальная точка начинает движение из точки О. Определить скорость
материальная точка начинает движение из точки О. Определить скорость ![]() и ускорение а точки при переносном вращательном движении.
и ускорение а точки при переносном вращательном движении.
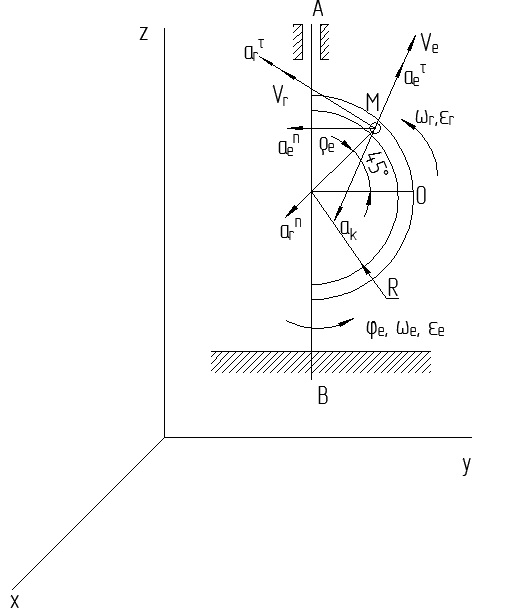
Рисунок 13 – Схема движения
4.1 Относительное движение точки М
Рассматриваем относительное движение точки М. «Движение точки по отношению к неподвижной системе координат называется абсолютным. Движение точки по отношению к подвижной системе координат называется относительным. Движение точки вместе с подвижной системой координат по отношению к неподвижной называется переносным.»
Определим положение точки при относительном движении. Для этого подставим заданное время в уравнение движения при относительном движении.
![]() (4.1)
(4.1)
По определению: первая производная от закона движения точки по времени – это скорость этой точки. Найдем ее.
![]() (4.2)
(4.2)
подставив заданное время:
![]() (4.3)
(4.3)
Определим угловое ускорение точки М. Для этого воспользуемся формулой Эйлера.
![]() (4.4)
(4.4)
Определим ускорения точки в относительном движении. Полное ускорение будет складываться из нормального и тангенциального ускорения. Нормальное ускорение точки при движении по окружности – это компонента полного ускорения точки, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной. Направлено к центру кривизны траектории. Тангенциальное ускорение – компонента полного ускорения точки, направленная по касательной к траектории движения. Характеризует изменение модуля скорости. Найдём эти составляющие полного ускорения. По определению: первая производная от закона изменения скорости по времени при вращательном движении – это тангенциальное ускорение точки.
![]() (4.5)
(4.5)
Используя формулу Эйлера, найдем нормальное ускорение точки М.
![]() (4.6)
(4.6)
На основании связи углового ускорения точки и угловой скорости найдем угловое ускорение точки М. Угловое ускорение точки при вращательном движении – это первая производная от закона изменения угловой скорости по времени.
![]() (4.7)
(4.7)
4.2 Переносное движение точки М
Рассматриваем переносное движение точки М. Определим характеристики вращательного движения. Определим угловую скорость. По определению: угловая скорость – это первая производная от закона изменения угла поворота по времени.
![]() (4.8)
(4.8)
подставим заданное время в уравнение 4.8:
![]() (4.9)
(4.9)
Определим угловое ускорение. Угловое ускорение точки при вращательном движении – это первая производная от закона изменения угловой скорости по времени.
![]() (4.10)
(4.10)
По формуле Эйлера найдем линейную скорость:
![]() (4.11)
(4.11)
Определим ![]() . Для этого спроецируем радиус R на ось y.
. Для этого спроецируем радиус R на ось y.
![]() (4.12)
(4.12)
Определим угол ![]() . Для этого рассмотрим дугу ОМ. Угол
. Для этого рассмотрим дугу ОМ. Угол ![]() – это отношение дуги ОМ к радиусу, на который опирается эта дуга.
– это отношение дуги ОМ к радиусу, на который опирается эта дуга.
![]() (4.13)
(4.13)
Используя уравнение 4.12 и 4.14 найдём ![]() :
:
![]() (4.14)
(4.14)
Используя уравнение 4.11 определим ![]() .
.
![]() (4.15)
(4.15)
Используя формулу Эйлера, найдем нормальное ускорение при переносном движении.
![]() (4.16)
(4.16)
Определим тангенциальное ускорение при переносном движении.
![]() (4.17)
(4.17)
Определим Кориолисово ускорение. Кориолисово ускорение – ускорение, возникающее при переносном вращательном движении. Направление Кориолисова ускорения определяется по правилу Жуковского. Правило Жуковского: для определения направления Кориолисова ускорения необходимо вектор относительной скорости ![]() спроецировать на плоскость перпендикулярную оси вращения и повернуть эту проекцию на 90 градусов по направлению угловой скорости переносного движении.
спроецировать на плоскость перпендикулярную оси вращения и повернуть эту проекцию на 90 градусов по направлению угловой скорости переносного движении.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
