
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таким образом мы нашли все кинематические характеристики груза 1, блока 2 и колеса 3.
Для проверки правильности расчетов решим задачу еще несколькими способами:
1. Теоремой об изменении кинетической энергии;
2. Принципом Даламбера – Лагранжа;
3. Уравнением Лагранжа второго рода.
6.2 Применение теоремы об изменении кинетической энергии к
исследованию динамики механической системы
Для расчета ускорения груза 1 воспользуемся теоремой об изменении кинетической энергии.
Теорема.
Изменение кинетической энергии при переходе механической системы из одного положения в другое равно сумме полных работ внешних и внутренних сил.
В нашей задачи отсутствуют внутренние силы, поэтому работу внутренних сил ![]() приравняем к нулю. Начальное значение кинетической энергии
приравняем к нулю. Начальное значение кинетической энергии ![]() примем равным нулю, так как система движется из состояния покоя. Тогда получим:
примем равным нулю, так как система движется из состояния покоя. Тогда получим:
 (6.27)
(6.27)
Учтем, что кинетическая энергия при вращении вокруг неподвижной оси равна половине произведения момента инерции тела относительно оси вращения на квадрат ее угловой скорости.
![]() (6.28)
(6.28)
Также учтем, что при поступательном движении кинетическая энергия – это половина произведения массы этой системы на квадрат ее скорости ее центра.
![]() (6.29)
(6.29)
Элементарной работой силы называется скалярное произведение силы на элементарное перемещение.
![]() (6.30)
(6.30)
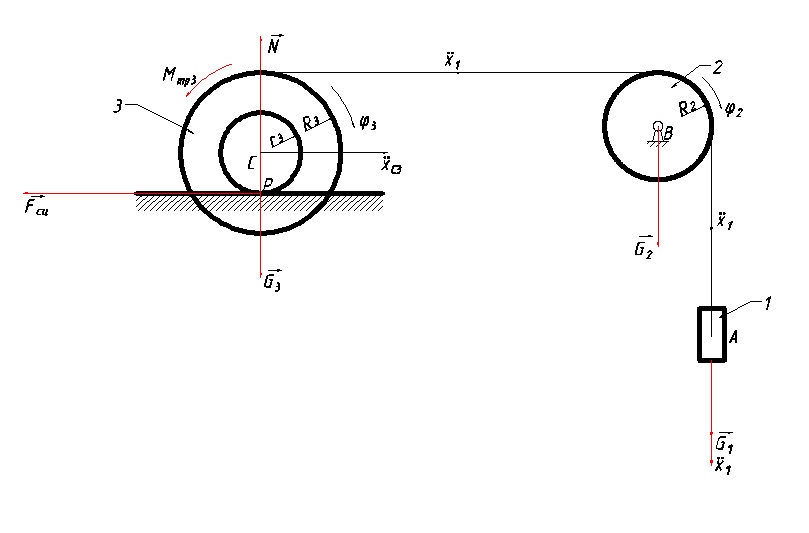
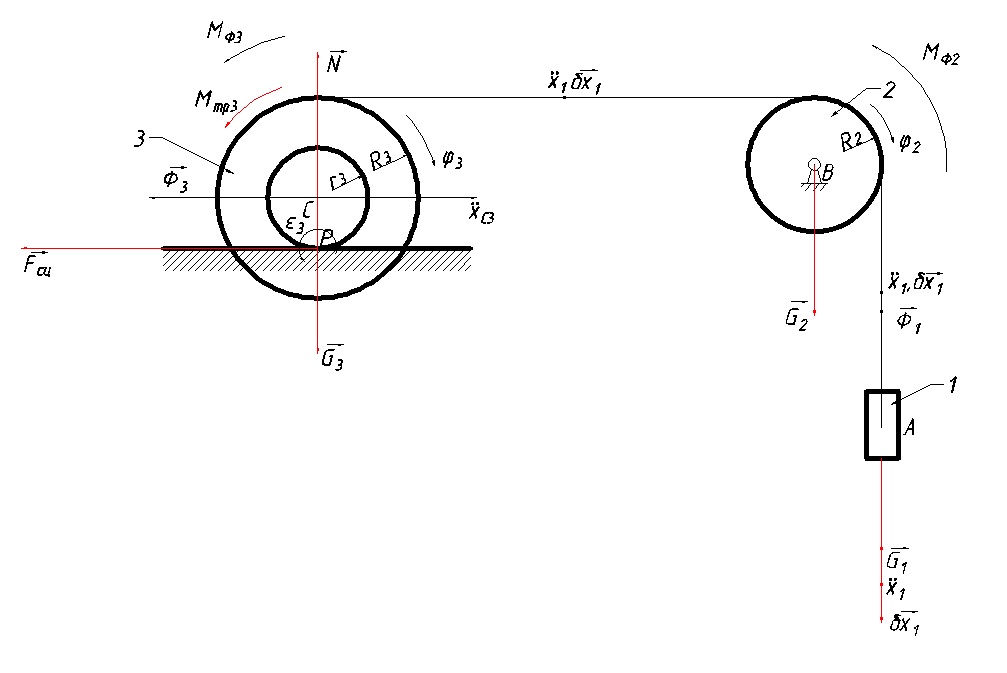
Рисунок 22 – Общая схема движения
Найдем кинетическую энергию для нашей системы (рисунок 22).
 (6.31)
(6.31)
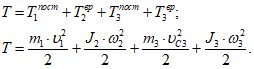
Учтя формулу 6.31, ![]() ,
,  ,
, ![]() ,
, ![]() получим:
получим:
 (6.32)
(6.32)
Найдем сумму работ всех внешних сил.
 (6.33)
(6.33)
Здесь работа силы ![]() ,
, ![]() равны нулю, так как перемещение в соответствии с уравнением 6.30 равно нулю. Тогда уравнение 6.33 примет вид:
равны нулю, так как перемещение в соответствии с уравнением 6.30 равно нулю. Тогда уравнение 6.33 примет вид:
 (6.34)
(6.34)
Найдем работу ![]() и
и ![]() . Для этого воспользуемся формулой связи:
. Для этого воспользуемся формулой связи:
![]() (6.35)
(6.35)
 (6.36)
(6.36)
Подставив их в уравнение 6.33 найдем работу:
 (6.37)
(6.37)
Подставив известные величины найдем работу:
 (6.38)
(6.38)
Приравняв предыдущее уравнение с уравнением 6.32, получим:
 (6.39)
(6.39)
Сократим массу в предыдущем уравнении найдем скорость ![]() :
:
 (6.40)
(6.40)
Данная зависимость показывает, как изменяется скорость с изменением координаты. Воспользовавшись уравнением 6.19, подставив в него время, допустим t=1 с, мы найдем как измениться скорость спустя такое время. Сделаем это:
![]()
подставив это число в уравнение 5.40 найдем скорость спустя время t=1 с.
Таким образом скорость спустя время равное t=1 с будет равна ![]() . В уравнении 6.19 это значение при подстановки t=1 с будут равно
. В уравнении 6.19 это значение при подстановки t=1 с будут равно ![]() . Имеется небольшая погрешность вычислений.
. Имеется небольшая погрешность вычислений.
6.3 Применение принципа Даламбера – Лагранжа к исследованию
динамики механической системы
Если механическая система, на которую наложены голономные стационарные связи движется с ускорением, то добавляя к действующим на нее активным силам и их моментам фиктивные силы и моменты сил инерции получим формально уравновешенную систему сил, для которой можно применить принцип возможных перемещений (ПВП).
 (6.41)
(6.41)
ПВП – это принцип, который говорит о том, что для равновесия механической системы, на которую наложены стационарные голономные идеальные связи необходимо и достаточно, чтобы сумма виртуальных работ всех активных сил была равна нулю.
 (6.42)
(6.42)
Фиктивные силы – это силы, которые уравновешивают активные силы. Голономные или интегрируемые связи – это связи, для которых существует множитель, позволяющий интегрировать уравнение кинематической связи. Виртуальная работа силы, приложенной к какой – либо точки тела, движущегося поступательно называется скалярное произведение вектора силы на вектор возможного перемещения точки к которой приложена сила.
![]() (6.43)
(6.43)
где ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
