
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таким образом мы нашли нагрузки во всех стержнях системы. Для проверки посчитаем узел F. Из уравнения 2.26 найдем:
![]()
![]()
![]()
![]()
Из уравнения 2.27 найдем:
![]()
![]()
![]()
![]()
Результаты расчетов и проверки сошлись в пределах допустимой погрешности.
2.3 Метод Риттера
Определение усилий в стержнях фермы заключается в том, что проводят сечение через три стержня фермы. Мысленно отбрасывают большую часть фермы, заменяя ее действие на оставшуюся часть усилиями, приложенными в соответствующих сечениях стержней и направленными в сторону отброшенной части. Чтобы определить усилие в стержне фермы, составляют уравнение моментов сил, действующих на оставшуюся часть фермы, относительно моментной точки – точки, в которой пересекаются два стержня, кроме искомого. Эта точка называется точкой Риттера. Знаки полученных ответов покажут, сжат стержень или растянут.
Методом Риттера найдем усилия в стержнях 1,2,3,4,5.
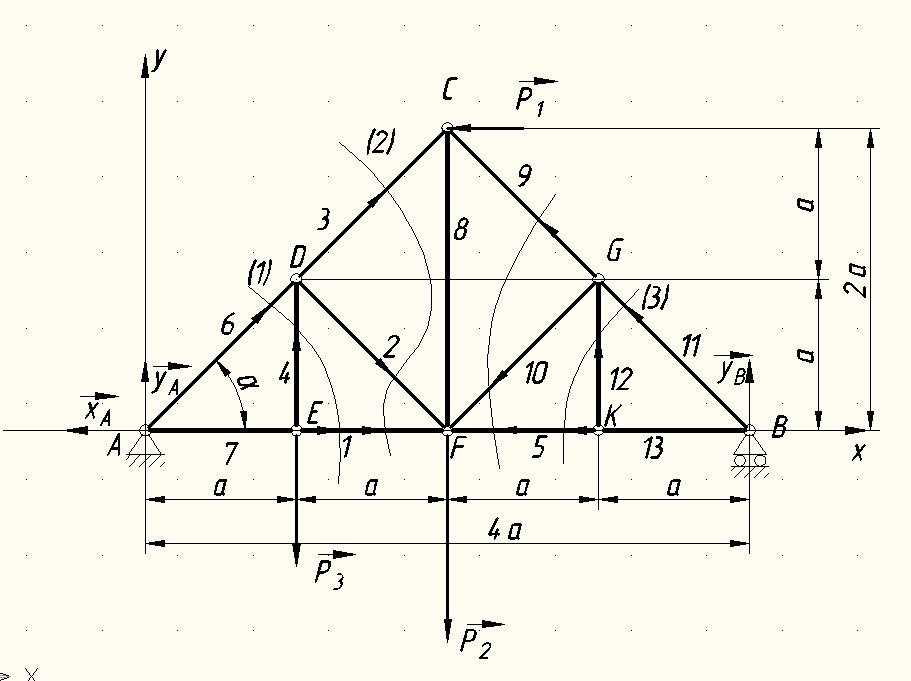
Рисунок 10 – Ферма мысленно разрезанная для расчета методом Риттера
Мысленно обрежем ферму по линии 1, отбросив правую часть, и определим момент относительно точки А (он должен быть нулевым).
![]()
![]() (2.49)
(2.49)
из уравнения 2.39 следует:
![]()
![]() (2.50)
(2.50)
Мысленно обрежем ферму по линии 2, отбросив правую часть, и определим момент относительно точки А (он должен быть нулевым).
![]()
![]() (2.51)
(2.51)
из уравнения 2.41 следует:
![]()
![]() (2.52)
(2.52)
Определим момент относительно точки D.
![]()
![]() (2.53)
(2.53)
из уравнения 2.43 следует:
![]()
![]() (2.54)
(2.54)
Определим момент относительно точки E.
![]()
![]() (2.55)
(2.55)
из уравнения 2.45 следует:
![]()
![]() (2.56)
(2.56)
Мысленно обрежем ферму по линии 3, отбросив левую часть, и определим момент относительно точки B (он должен быть нулевым).
![]()
![]() (2.57)
(2.57)
Мысленно обрежем ферму по линии 4, отбросив левую часть, и определим момент относительно точки G (он должен быть нулевым).
![]()
![]() (2.58)
(2.58)
из уравнения 2.48 следует:
![]()
![]() (2.59)
(2.59)
Таким образом расчеты, сделанные с помощью метода вырезания узлов и метода Риттера, полностью совпадают.
На основании леммы «если в узле плоской фермы сходятся три стержня, два из которых расположены на одной прямо, то усилие в третьем стержне равно нулю. Усилия в первых двух стержнях равны между собой» можно сразу найти нулевой стержень![]() .
.
2.4 Расчет главного вектора и главного момента
1.Определим модуль главного вектора заданных систем сил по проекциям на координатные оси.
![]() (2.60)
(2.60)
![]() (2.61)
(2.61)
![]() (2.62)
(2.62)
2.Вычислим главный момент заданных сил.
![]() (2.63)
(2.63)
2.5 Расчет плоской фермы на ПЭВМ при помощи программы PIVOT
Составляем таблицы для ввода в ПЭВМ.
Таблица 4 – Исходные паpаметpы узлов феpмы
IU | NPU | XU | YU |
1 | 2 | 0,0 | 0,0 |
2 | 4 | 1,0 | 1,0 |
3 | 3 | 2,0 | 2,0 |
4 | 4 | 3,0 | 1,0 |
5 | 2 | 4,0 | 0,0 |
6 | 3 | 3,0 | 0,0 |
7 | 5 | 2,0 | 0,0 |
8 | 3 | 1,0 | 0,0 |
Таблица 5 – Исходные параметры опорных реакций
№ | Код опоры | Направляющие векторы | Координаты опоры | Опора | ||||||
С1 | С2 | С3 | С4 | RVX | RVY | RMZ | XS | YS | ||
1 | 1 | 2 | 2 | 0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | А |
2 | 1 | 2 | 1 | 0 | 0,0 | 1,0 | 0,0 | 4,0 | 0,0 | В |
Таблица 6 – Исходные паpаметpы стеpжней феpмы

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
