
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() (1.39)
(1.39)
![]()
![]() (1.40)
(1.40)
![]() (1.41)
(1.41)
Из формулы 36 найдем:
![]()
![]() (1.42)
(1.42)
Сосредоточенная сила Q2 – наклонная. Находим ее проекции на оси координат, в соответствии с теоремой Вариньона:
![]()
![]() (1.43)
(1.43)
![]()
![]() (1.44)
(1.44)
Математическое выражение главного вектора для балки КЕ будет иметь вид:
 (1.45)
(1.45)
Записываем уравнения равновесия балки КЕ составной конструкции:
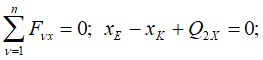 (1.46)
(1.46)
 (1.47)
(1.47)

![]() (1.48)
(1.48)
1.4 Решение полученных уравнений равновесия
Из полученных уравнений равновесия выразим в явном виде неизвестные и найдем их. Из уравнения 1.25:
![]()
![]() (1.49)
(1.49)
из уравнения 1.24:
![]()
![]() (1.50)
(1.50)
из уравнения 1.34:
![]()
![]() (1.51)
(1.51)
из уравнения 1.47:
![]()
![]() (1.52)
(1.52)
из уравнения 1.48:

 (1.53)
(1.53)
из уравнения 1.46:
![]()
![]() (1.54)
(1.54)
из уравнения 1.23:
![]()
![]() (1.55)
(1.55)
из уравнения 1.33:
![]()
![]()
из уравнения 1.35:

 (1.56)
(1.56)
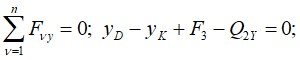
Для проверки правильности расчетов необходимо убедиться в том, что соблюдаются уравнения равновесия сил, приложенных ко всей конструкции, представленной на рисунке 1.
Для этого, запишем уравнение моментов относительно точки А для всей схемы, представленной на рисунке 5
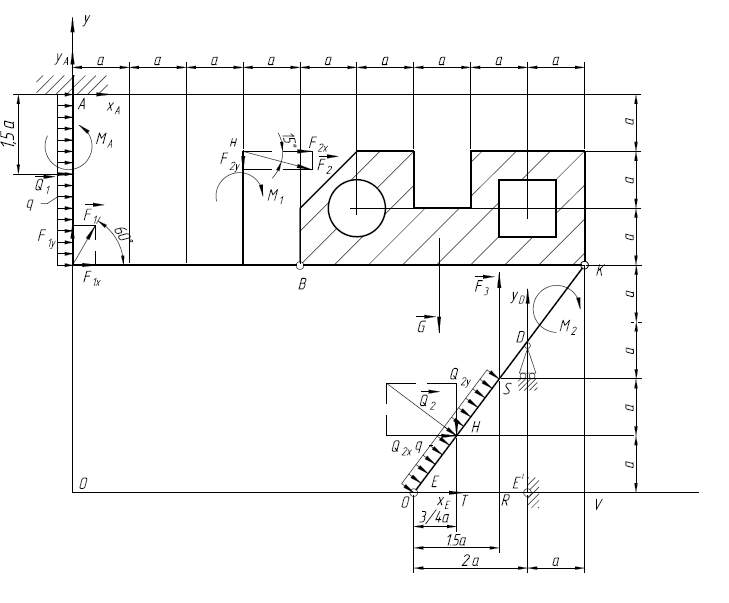
Рисунок 5 – Расчетная схема составной конструкции
 (1.57)
(1.57)
 (1.58)
(1.58)
Таким образом погрешность вычислений равна:
 (1.59)
(1.59)
1.5 Определение главного вектора и главного момента плоской
системы сил
Основными характеристиками системы сил, приложенных к механической системы являются две величины – главный вектор и главный момент. Главный вектор плоской системы сил – это геометрическая сумма всех сил.
Определяем модуль главного вектора заданных систем сил для балки АВ:
![]() (1.60)
(1.60)
![]() (1.61)
(1.61)
![]() (1.62)
(1.62)
Определяем модуль главного вектора заданных систем сил для плиты BК:
![]() (1.63)
(1.63)
![]() (1.64)
(1.64)
![]() (1.65)
(1.65)
Определяем модуль главного вектора заданных систем сил для балки КЕ:
![]() (1.66)
(1.66)
![]() (1.67)
(1.67)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
