
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
подставив известные величины найдем ![]() :
:
![]()
Учитывая, что ![]() найдем
найдем ![]()
Найдем ускорение точки С. Напишем уравнение относительно полюса А:
![]() (5.28)
(5.28)
Чтобы определить модуль ![]() необходимо рассмотреть проекции
необходимо рассмотреть проекции ![]() и
и ![]()
![]() (5.29)
(5.29)
![]() (5.30)
(5.30)
где ![]() , так как угловые скорости одного тела равны.
, так как угловые скорости одного тела равны.
Определим ![]() . Для этого воспользуемся формулой Эйлера:
. Для этого воспользуемся формулой Эйлера:
![]() (5.31)
(5.31)
где ![]() так как угловые ускорения одного тела равны.
так как угловые ускорения одного тела равны.
Подставим известные значения в уравнения 5.29 и 5.30 определим ![]() и
и ![]() :
:
![]()
![]()
Модуль определим по геометрической сумме:
![]()
5.4 Результаты расчетов
Таблица 11 – Таблица ответов
Значения, полученные аналитическим методом [м/с; м/с2] | |||||
|
|
|
|
|
|
0,4 | 0,3878 | 0,3638 | 0,8 | 0,588 | 0,642 |
Значения, полученные расчетом на ПЭВМ | |||||
0,3999 | 0,3896 | 0,3641 | 0,7998 | 0,596 | 0,645 |
Определим погрешность результатов:






5.5 Вывод по разделу
Таким образом максимальная погрешность между аналитическим методом расчета и расчете на ПЭВМ составляет 1,34![]() . Что является допустимой погрешностью вычислений.
. Что является допустимой погрешностью вычислений.
6 ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ
Постановка задачи:
Груз 1, массой m1=3m подвешен на невесомой, нерастяжимой нити к закрепленному блоку 2, который является полым цилиндром радиуса R2=0,4 м и массой m2=5m (рисунок 18). Блок 2 связан невесомой, нерастяжимой нитью с колесом 3, который имеет радиус инерции ![]() , массу m3=10m и радиус R3=0,6 м. Радиус малого колеса
, массу m3=10m и радиус R3=0,6 м. Радиус малого колеса ![]() . Определить ускорение груза 1.
. Определить ускорение груза 1.
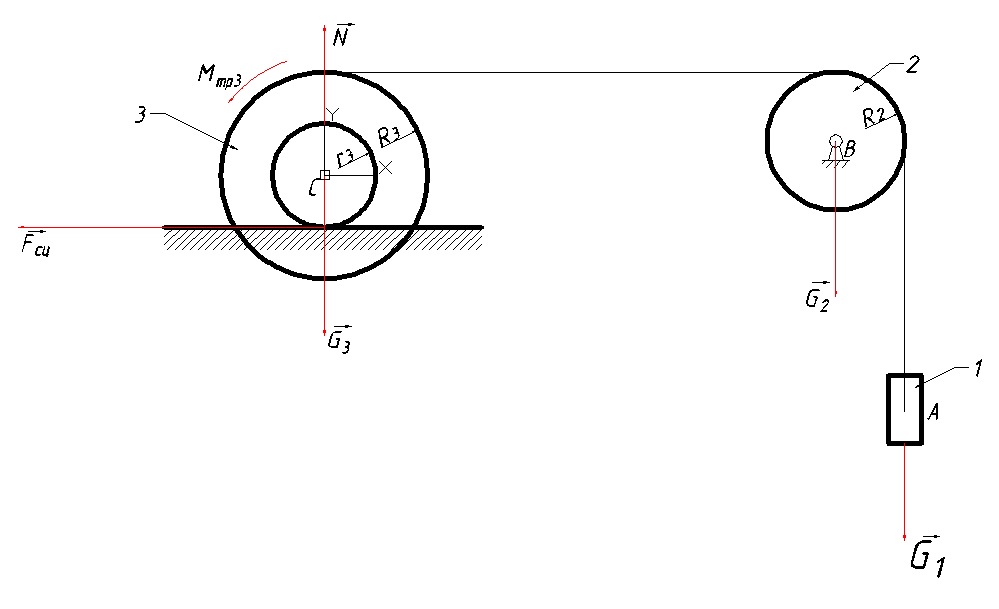 Рисунок 18 – Общая схема действия сил
Рисунок 18 – Общая схема действия сил
6.1 Нахождение ускорения
Для определения ускорения груза 1 необходимо написать дифференциальное уравнение динамики. Его общий вид:
 (6.1)
(6.1)
в проекциях на оси координат:
 (6.2)
(6.2)
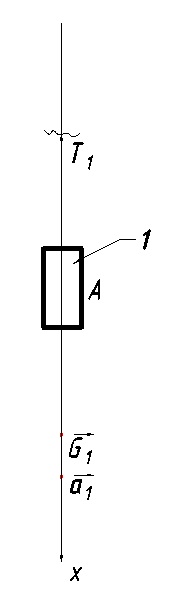
Рисунок 19 – Груз 1
Разрежем нить Т1 по линии и напишем уравнение динамики для груза 1:
![]() (6.3)
(6.3)
в проекции на ось X:
![]()
Учтем что ![]() (
(![]() – ускорение свободного падения):
– ускорение свободного падения):
![]() (6.4)
(6.4)
где ![]() – это ускорение груза 1 (a1), так как это вторая производная от закона движения.
– это ускорение груза 1 (a1), так как это вторая производная от закона движения.
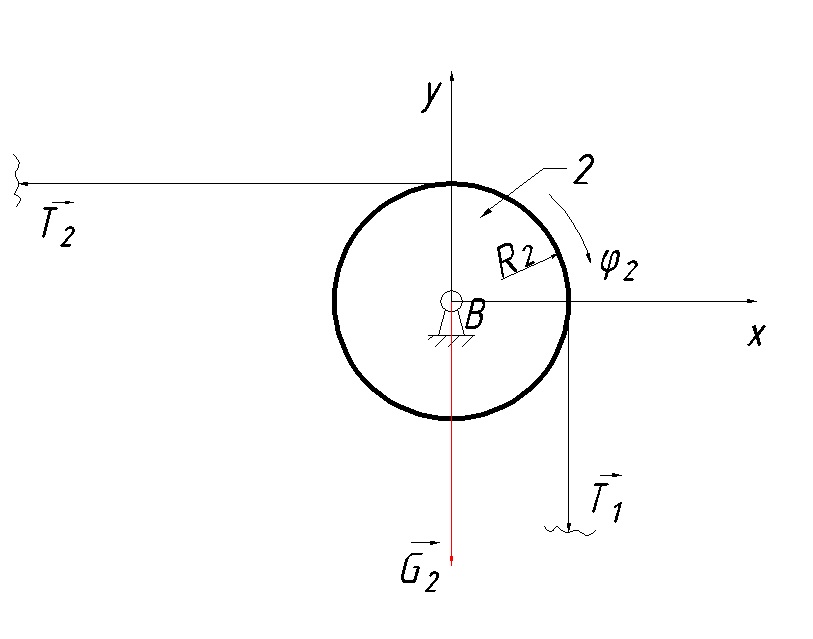
Рисунок 20 – Блок 2
Рассмотрим второй блок. Напишем уравнение главного момента относительно оси Z:
 (6.5)
(6.5)
Для нашего случая, учтя знаки:
![]() (6.6)
(6.6)
где момент инерции ![]() , так это однородный цилиндр. По формуле Эйлера в дифференциальной форме
, так это однородный цилиндр. По формуле Эйлера в дифференциальной форме  . Тогда уравнение 5.6 примет вид:
. Тогда уравнение 5.6 примет вид:
 (6.7)
(6.7)
где R2 сократиться.
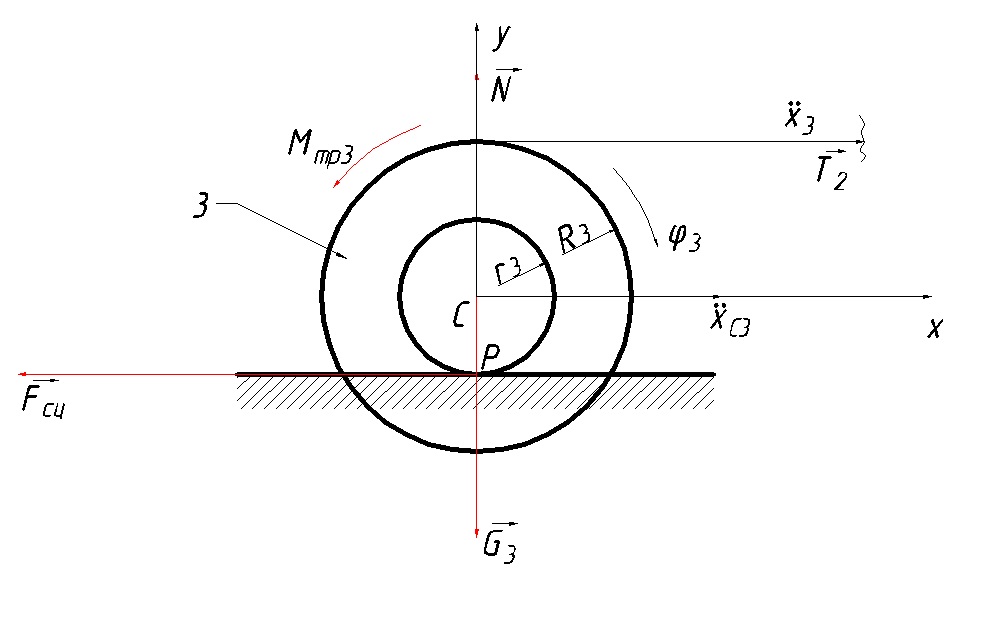
Рисунок 21 – Колесо 3
Рассмотрим колесо 3. Напишем уравнение моментов относительно оси Z:
![]() (6.8)
(6.8)
где ![]() . Определим
. Определим ![]() в предыдущем уравнении:
в предыдущем уравнении:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
