


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При нумерации надо стремиться к тому, чтобы наибольшая разность номеров «взаимодействующих» узлов была как можно меньше. В данном случае общее число неизвестных перемещений за вычетом перемещений закрепленных на границе узлов будет n = 2*133-2*7-7=245. Таков порядок системы уравнений в данной задаче; полуширина ленты М=30. ленточность структуры уравнений является большим достоинством МКЭ, так как упрощает и ускоряет решение уравнений.
На следующем этапе строятся матрицы жесткости отдельных элементов в местной системе координат ![]() . В данном случае все элементы одинаковые и матрицы
. В данном случае все элементы одинаковые и матрицы ![]() строились, как описано в § 8.9. В общем случае они могут быть различными по форме, материалу, размерам.
строились, как описано в § 8.9. В общем случае они могут быть различными по форме, материалу, размерам.
Далее из матрицы ![]() надо сформировать матрицу жесткости всей конструкции
надо сформировать матрицу жесткости всей конструкции ![]() в общей системе координат
в общей системе координат ![]() . В данном случае неизвестные в местной системе
. В данном случае неизвестные в местной системе ![]() и в общей системе
и в общей системе ![]() по направлению совпадают. Они лишь имеют различную нумерацию. Так, показанный на рис. 4.9, б 30-й элемент ABCD в соответствии с рис. 4.3, а, б будет иметь нумерацию неизвестных:
по направлению совпадают. Они лишь имеют различную нумерацию. Так, показанный на рис. 4.9, б 30-й элемент ABCD в соответствии с рис. 4.3, а, б будет иметь нумерацию неизвестных: ![]() . В то же время в общей системе в узлах A, B, C, D номера неизвестных будут
. В то же время в общей системе в узлах A, B, C, D номера неизвестных будут ![]() . Поэтому элементы должны будут попасть в соответствующие клетки общей матрицы жесткости.
. Поэтому элементы должны будут попасть в соответствующие клетки общей матрицы жесткости.
Такая рассылка элементов матриц жесткости отдельных конечных элементов с их суммированием в клетках общей матрицы ![]() производится автоматически на основе общей логической процедуры. Оси
производится автоматически на основе общей логической процедуры. Оси ![]() могут быть повернуты по отношению к общим осям
могут быть повернуты по отношению к общим осям ![]() . Тогда требуется предварительно преобразование матрицы
. Тогда требуется предварительно преобразование матрицы ![]() . Эти вопросы изучаются в курсе строительной механики.
. Эти вопросы изучаются в курсе строительной механики.
Далее формируется столбец грузовых членов системы уравнений из узловых сил. В данном примере такие узловые силы имеются лишь в узлах верхнего горизонтального ряда сетки.
После решения общей системы уравнений получаем все перемещения узлов ![]() в общей системе координат. На этом этапе надо перейти обратно от указанных перемещений
в общей системе координат. На этом этапе надо перейти обратно от указанных перемещений ![]() к перемещениям узлов
к перемещениям узлов ![]() в местной системе для каждого элемента. Это опять делается в автоматическом режиме.
в местной системе для каждого элемента. Это опять делается в автоматическом режиме.
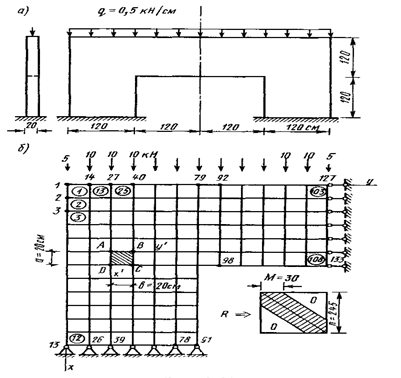
Рис. 4.9
Наконец, после того как найдены перемещения узлов каждого элемента ![]() , по формулам типа (4.28) в нем могут быть найдены напряжения
, по формулам типа (4.28) в нем могут быть найдены напряжения
![]() .
.
На рис.4.10 показана общая картина перемещений узлов (с увеличением в 500 раз), а на рис. 4.11 – эпюры напряжений в двух сечениях конструкции. В расчетах принято ![]() . В заключение отметим, что здесь изложены лишь начальные основы МКЭ. Более подробные сведения можно найти в учебнике [2] и в специальной литературе.
. В заключение отметим, что здесь изложены лишь начальные основы МКЭ. Более подробные сведения можно найти в учебнике [2] и в специальной литературе.
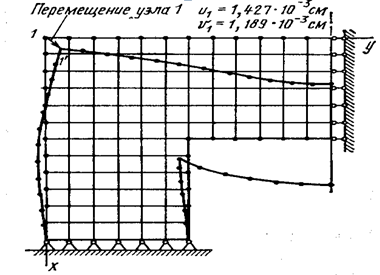
Рис. 4.10
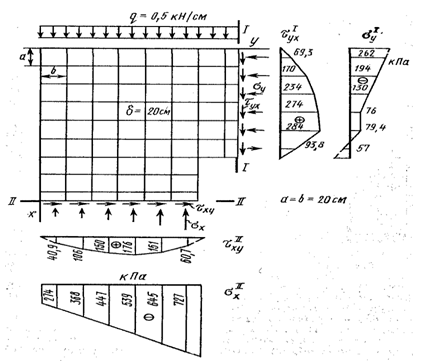
Рис. 4.11
Это только основы МКЭ.
Рекомендуемый библиографический список
1. Агапов конечных элементов в статике, динамике и устойчивости пространственных тонкостенных подкрепленных конструкций. И: АСВ, Москва, 2000 – 152 с.
2. , , Шапошников механика. Тонкостенные пространственные системы. И: Стройиздат., Москва., 1983 – 488с.
3. , Потапов теории упругости и пластичности. И. Высшая школа. Москва., 1984 – 428 с.
4. ANSYS в примерах и задачах. И: Компьютер-Пресс, Москва., 2002 -221 с.
5. Белобородов качества построения конечноэлементной модели. Тюмень, «Сибнефтеавтоматика», ТГНГУ, 2004. – 6 с.
6. етод конечных элементов. (Основы) И: Мир., 1984 – 428 с.
7. , , Лантух-Лященко конечных элементов в проектировании транспортных сооружений. И: Транспорт, 1981. – 143 с.
8. онечные элементы и аппроксимация. И: Мир, Москва. 1986. – 318 с.
9. , , ANSYS в руках инженера. И: Editorial УРСС, 2003. – 272 с.
10. Конюхов анализа конструкций в ANSYS., Казань., 2001. -101 с.
11. Мяченков машиностроительных конструкций методом конечных элементов. М. Машиностроение, 1989. – 520с.
ОГЛАВЛЕНИЕ
Введение 3
Глава 1 теория напряженно-деформированного состояния в точке тела 5
1.1 Нагрузки и напряжения. тензор напряжений 5
Глава 2. Основные уравнения теории упругости 8
2.1 Уравнения равновесия элемента тела (статические уравнения) 9
2.2 Геометрические уравнения 14
2.3 Уравнения совместности деформаций 18
2.4 Физические уравнения теории упругости 20
2.5 Понятие о методе напряжений и методе перемещений 22
Глава 3. Вариационная формулировка задач теории упругости 26
3.1. Общие замечания 26
3.2. Энергия деформируемого тела как функционал 27
3.3. Вариационный принцип Лагранжа 34
3.4 Связь между вариационной и дифференциальной формулировками задач теории упругости 36
3.5. Метод Ритца 39
3.6. Принцип Кастильяно 43
3.7 Температурные напряжения 46
Глава 4. Метод конечных элементов (МКЭ) 51
4.1 Сущность метода конечных элементов 51
4.2 Построение матриц жесткости конечного элемента 59
4.3 Общая процедура расчета по МКЭ 66
Предлагаемый библиографический список 69
ЕРЕМЕНКО ЛЮБОВЬ ГЕОРГИЕВНА
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ СТЕРЖНЕВЫХ СИСТЕМ, ПЛАСТИН И ОБОЛОЧЕК
Учебное пособие
Тем. план 2009.
В печать 07.04.09.
Объем 2.5 усл. п.л. Офсет. Формат 60х84/16
Бумага тип № 3. Заказ Тираж 100. Цена свободная.
Издательский центр ДГТУ
Адрес университета и полиграфического предприятия:
344010, г. Ростов-на-Дону, пл. Гагарина, 1.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
