


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() ; (3.24)
; (3.24)
![]()
![]() ,
, ![]() . (3.25)
. (3.25)
Таким образом, вариационное уравнение ![]() , в интегральной форме выражающее условия равновесия деформированного тела, эквивалентно и включает в себя соответствующие дифференциальные уравнения равновесия теории упругости вместе с условиями равновесия на поверхности тела (граничными условиями). Указанные дифференциальные уравнения служат уравнениями Эйлера функционала
, в интегральной форме выражающее условия равновесия деформированного тела, эквивалентно и включает в себя соответствующие дифференциальные уравнения равновесия теории упругости вместе с условиями равновесия на поверхности тела (граничными условиями). Указанные дифференциальные уравнения служат уравнениями Эйлера функционала ![]() . При этом если последний будет выражен только через три функции перемещений
. При этом если последний будет выражен только через три функции перемещений ![]() , то, следуя по пути, показанному в примере, мы придем к уравнениям Эйлера в форме уравнений Ляме (2.30), т. е. уравнений равновесия, записанных в перемещениях. Отметим, что в этом случае при исключении из уравнения
, то, следуя по пути, показанному в примере, мы придем к уравнениям Эйлера в форме уравнений Ляме (2.30), т. е. уравнений равновесия, записанных в перемещениях. Отметим, что в этом случае при исключении из уравнения ![]() частных производных функций
частных производных функций ![]() ,
, ![]() ,
, ![]() потребуется операция, аналогичная интегрированию по частям – переход от интеграла по объему к интегралу по поверхности по формуле Грина. На этих преобразованиях останавливаться не будем.
потребуется операция, аналогичная интегрированию по частям – переход от интеграла по объему к интегралу по поверхности по формуле Грина. На этих преобразованиях останавливаться не будем.
Вариационная формулировка задачи теории упругости используется главным образом в двух случаях. В первом на основе уравнения ![]() строятся численные методы решения этой задачи (метод Ритца, метод конечных элементов и т. п.). Все эти методы относят к классу прямых методов решения задач теории упругости, не требующих в явной форме использования дифференциальных уравнений.
строятся численные методы решения этой задачи (метод Ритца, метод конечных элементов и т. п.). Все эти методы относят к классу прямых методов решения задач теории упругости, не требующих в явной форме использования дифференциальных уравнений.
Второй характерный случай применения вариационного подхода – это получение дифференциальных уравнений и граничных условий рассматриваемой задачи, как уравнений Эйлера соответствующего функционала. Такой путь оказывается оправданным для тел сложной формы и структуры (например, многослойные оболочки и др.), а также при переходе от одной системы координат к другой (от декартовой системы к полярной, криволинейной и другим системам).
3.5. Метод Ритца
Условие стационарности функционала ![]() формулирует континуальную вариационную задачу с бесконечным числом компонент перемещений, определяющих разыскиваемые функции-экстремали. Идея метода, предложенного еще в начале века немецким ученым Рицем, состоит в том, чтобы от континуальной формулировки перейти к дискретной, когда функционал
формулирует континуальную вариационную задачу с бесконечным числом компонент перемещений, определяющих разыскиваемые функции-экстремали. Идея метода, предложенного еще в начале века немецким ученым Рицем, состоит в том, чтобы от континуальной формулировки перейти к дискретной, когда функционал ![]() , заменяется функцией
, заменяется функцией ![]()
![]() , зависящей от конечного числа аргументов
, зависящей от конечного числа аргументов ![]() . После этого задача определения экстремалей функционала перейдет в стандартную задачу исследования указанной функции дискретного числа аргументов на экстремум. Другими словами, от континуальной задачи с бесконечным числом степеней свободы в отношении формы деформирования тела мы переходим к задаче для системы с конечным числом степеней свободы.
. После этого задача определения экстремалей функционала перейдет в стандартную задачу исследования указанной функции дискретного числа аргументов на экстремум. Другими словами, от континуальной задачи с бесконечным числом степеней свободы в отношении формы деформирования тела мы переходим к задаче для системы с конечным числом степеней свободы.
В общем случае трехмерного тела для перемещений ![]() ,
, ![]() ,
, ![]() зададимся выражением в виде суммы:
зададимся выражением в виде суммы:
 , (3.26)
, (3.26)
где ![]() – неизвестные числа (обобщенные перемещения), подлежащие определению:
– неизвестные числа (обобщенные перемещения), подлежащие определению: ![]() – базисные функции, которыми мы задаемся так, чтобы они удовлетворяли условиям закрепления тела.
– базисные функции, которыми мы задаемся так, чтобы они удовлетворяли условиям закрепления тела.
Подставляя (3.26) в функционал (3.11) для линейно деформируемых систем, после вычисления определенных интегралов от функций ![]() и их производных получим его в виде квадратичной формы
и их производных получим его в виде квадратичной формы
![]() . (3.27)
. (3.27)
При этом можно убедиться, расписав упомянутые определенные интегралы, что всегда ![]()
![]() . Из условия
. Из условия  ввиду произвольности вариаций
ввиду произвольности вариаций ![]() , получаем
, получаем ![]() уравнений
уравнений
![]()
![]() (3.28)
(3.28)
которые в случае линейно деформируемой системы с учетом (3.27) образуют систему ![]() алгебраических линейных уравнений относительно обобщенных перемещений
алгебраических линейных уравнений относительно обобщенных перемещений ![]() :
:
 (3.29)
(3.29)
Выделим из (3.29) матрицу и вектор:
R ;
;  . (3.30)
. (3.30)
Матрица R называется матрицей жесткости, соответствующей вектору обобщенных перемещений ![]() . Она симметрична относительно главной диагонали, так как
. Она симметрична относительно главной диагонали, так как ![]() . Произведение
. Произведение
R![]() дает вектор обобщенных упругих сил. Вектор
дает вектор обобщенных упругих сил. Вектор ![]() – это вектор обобщенных внешних сил. Поэтому равенства (3.28) и (3.29), которые могут быть записаны кратко в виде
– это вектор обобщенных внешних сил. Поэтому равенства (3.28) и (3.29), которые могут быть записаны кратко в виде
![]() , (3.31)
, (3.31)
приобретают простой механический смысл, а именно: если деформированное тело (или система тел) находится в равновесии, то суммарная обобщенная сила, отвечающая каждому из возможных перемещений ![]() , равна нулю. При этом суммарная обобщенная сила состоит из упругой силы
, равна нулю. При этом суммарная обобщенная сила состоит из упругой силы ![]() и внешней обобщенной силы
и внешней обобщенной силы ![]() .
.
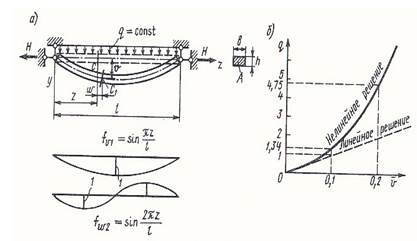
Рис. 3.7
Если тело является нелинейно деформируемым, то функционал ![]() от
от ![]() будет зависеть более сложно, чем квадратичная форма (3.27), и система уравнений (3.28) будет нелинейной относительно
будет зависеть более сложно, чем квадратичная форма (3.27), и система уравнений (3.28) будет нелинейной относительно ![]() . Проиллюстрируем сказанное характерным примером.
. Проиллюстрируем сказанное характерным примером.
На рис. 3.7, а показана балка, имеющая на концах шарнирно неподвижные опоры. При ее искривлении длина оси увеличивается и балка работает как на изгиб, так и на растяжение, а в горизонтальных связях возникают растягивающие силы ![]() . Получим зависимость между нагрузкой
. Получим зависимость между нагрузкой ![]() и прогибами
и прогибами ![]() такой системы.
такой системы.
На осевые продольные деформации ![]() будет влиять не только продольное перемещение
будет влиять не только продольное перемещение ![]() , но и поперечное перемещение
, но и поперечное перемещение ![]() , причем эта зависимость нелинейная и приближенно имеет вид уравнений:
, причем эта зависимость нелинейная и приближенно имеет вид уравнений:
![]()
![]() (3.32)
(3.32)
По аналогии с этими уравнениями имеем зависимость для осевой деформации ![]() , а также для продольной силы
, а также для продольной силы ![]() . Как видим, данная система относится к разряду геометрически нелинейных систем. Плотность энергии деформации растяжения балки (на единицу длины) будет
. Как видим, данная система относится к разряду геометрически нелинейных систем. Плотность энергии деформации растяжения балки (на единицу длины) будет

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
