


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В случае линейного напряженного состояния плотность энергии деформации выражается площадью диаграммы деформирования материала (рис. 3.2, в – нелинейно-упругий материал, рис. 3.2, ![]()
![]() – линейно-упругий). В последнем случае
– линейно-упругий). В последнем случае ![]() . Обобщая эту формулу на случай объемного напряженного состояния, получим
. Обобщая эту формулу на случай объемного напряженного состояния, получим
![]() , (3.5)
, (3.5)
или в сокращенной форме, используя обозначения векторов ![]() и
и ![]() [(2.5), (2.15)], запишем (3.5) в виде
[(2.5), (2.15)], запишем (3.5) в виде
![]() . (3.6)
. (3.6)
Во всем объеме ![]() энергию деформации
энергию деформации ![]() найдем путем интегрирования по объему:
найдем путем интегрирования по объему:
![]() (3.7)
(3.7)
Подчеркнем, что при вычислении ![]() как работы следует вычислять работу именно внутренних напряжений
как работы следует вычислять работу именно внутренних напряжений ![]() в отличие от напряжений
в отличие от напряжений ![]() , приложенных к граням кубика материала и являющихся для него внешним воздействием (рис. 3.3). На рисунке показано,
, приложенных к граням кубика материала и являющихся для него внешним воздействием (рис. 3.3). На рисунке показано,

Рис. 3.3
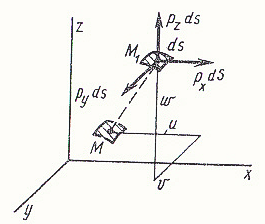
Рис. 3.4
что материал элемента условно удален и заменен внутренними («стягивающими») напряжениями ![]() . При уменьшении деформации от
. При уменьшении деформации от ![]() до нуля напряжение
до нуля напряжение ![]() совершает положительную работу, равную
совершает положительную работу, равную ![]() . Вообще, упругие силы, стремясь восстановить первоначальную форму деформированного тела, будут давать положительную энергию деформации (3.7) и создавать положительный вклад в общий баланс энергии
. Вообще, упругие силы, стремясь восстановить первоначальную форму деформированного тела, будут давать положительную энергию деформации (3.7) и создавать положительный вклад в общий баланс энергии ![]() .
.
Теперь составим выражение для потенциала внешних сил ![]() . Будем считать, что значение этих сил не зависит от перемещения точки приложения силы (весовая нагрузка, давление жидкости или газа и т. п.). На рис. 3.4 показаны элементарные поверхностные силы
. Будем считать, что значение этих сил не зависит от перемещения точки приложения силы (весовая нагрузка, давление жидкости или газа и т. п.). На рис. 3.4 показаны элементарные поверхностные силы ![]() ,
, ![]() , и
, и ![]() , действующие на площадку
, действующие на площадку ![]() в деформированном состоянии. При переводе тела в недеформированное состояние точка
в деформированном состоянии. При переводе тела в недеформированное состояние точка ![]() перейдет в положение
перейдет в положение ![]() и указанные силы совершат отрицательную работу на перемещениях, соответственно
и указанные силы совершат отрицательную работу на перемещениях, соответственно ![]() ,
, ![]() и
и ![]() . Следовательно,
. Следовательно, ![]() . Аналогично, для объемной нагрузки получим
. Аналогично, для объемной нагрузки получим ![]() . Интегрируя по поверхности тела
. Интегрируя по поверхности тела ![]() и объему
и объему ![]() , найдем потенциал внешних сил в виде
, найдем потенциал внешних сил в виде
![]() (3.8)
(3.8)
или в сокращенной векторной форме
![]() (3.9)
(3.9)
Легко видеть, что величина энергии ![]() , так же как и
, так же как и ![]() , вполне определяется заданием функций перемещений
, вполне определяется заданием функций перемещений ![]() ,
, ![]() и
и ![]() . Действительно, используя закон Гука (2.24) и уравнения Коши (2.16), выражению (3.6) для
. Действительно, используя закон Гука (2.24) и уравнения Коши (2.16), выражению (3.6) для ![]() можно придать вид
можно придать вид
![]() . (3.10)
. (3.10)
Следовательно, полная энергия является функционалом, зависящим от выбора трех функций-аргументов
![]() , т. е.
, т. е. ![]() ,
,
или в развернутой форме
![]() , (3.11)
, (3.11)
где ![]() – матрица закона Гука (2.25)
– матрица закона Гука (2.25)
![]() – матрица оператора дифференцирования (2.6).
– матрица оператора дифференцирования (2.6).
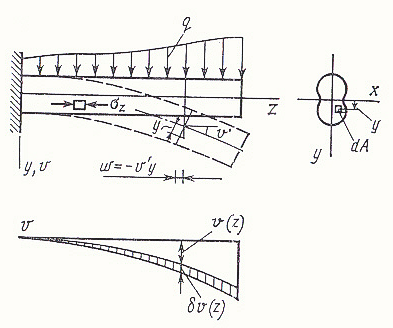
Рис. 3.5
Приведем пример составления функционала (3.11). составим выражение полной энергии ![]() для балки (рис. 3.5), считая, как это делается обычно в сопротивлении материалов, справедливой гипотезу плоских сечений и пренебрегая влиянием на ее деформации напряжений
для балки (рис. 3.5), считая, как это делается обычно в сопротивлении материалов, справедливой гипотезу плоских сечений и пренебрегая влиянием на ее деформации напряжений ![]() ,
, ![]() и касательных напряжений
и касательных напряжений ![]() . Таким образом, при определении энергии упругой деформации
. Таким образом, при определении энергии упругой деформации ![]() будем учитывать только напряжения
будем учитывать только напряжения ![]() . В этом случае
. В этом случае ![]() . Перемещение
. Перемещение ![]() точки сечения за счет его поворота на угол
точки сечения за счет его поворота на угол ![]() будет
будет ![]() ; следовательно,
; следовательно, ![]() , а
, а ![]() . Здесь и далее штрихом отмечаем дифференцирование по
. Здесь и далее штрихом отмечаем дифференцирование по ![]() . Интегрируя по объему балки, найдем
. Интегрируя по объему балки, найдем
 . (3.12)
. (3.12)
В выражении для ![]() интеграл
интеграл ![]() , вычисляемый по площади сечения А, заменен на момент инерции этого сечения
, вычисляемый по площади сечения А, заменен на момент инерции этого сечения ![]() .
.
Потенциал нагрузки ![]() найдем в виде
найдем в виде  . Окончательно функционал полной энергии (3.12) получит вид
. Окончательно функционал полной энергии (3.12) получит вид
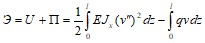 . (3.13)
. (3.13)
3.3. Вариационный принцип Лагранжа
Применим к деформированному телу принцип возможных перемещений Лагранжа. Он выражает условие равновесия системы внутренних и внешних сил. Согласно этому принципу, если ![]() – истинные перемещения точек тела, при которых имеет место равновесие упомянутых систем сил, то работа этих сил на произвольном бесконечном малом изменении перемещений
– истинные перемещения точек тела, при которых имеет место равновесие упомянутых систем сил, то работа этих сил на произвольном бесконечном малом изменении перемещений ![]() , допускаемом связями тела, должна быть равна нулю. Бесконечно малые функции
, допускаемом связями тела, должна быть равна нулю. Бесконечно малые функции ![]() ,
, ![]() ,
, ![]() называются вариациями функций
называются вариациями функций ![]() ,
, ![]() ,
, ![]() . Функция прогибов
. Функция прогибов ![]() и ее вариация
и ее вариация ![]() показаны на рис. 3.5 внизу.
показаны на рис. 3.5 внизу.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
