


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Преобразования по (2.30) приводят к трем уравнениям равновесия, выраженным через перемещения (уравнения Ляме):
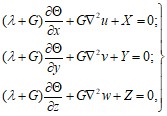 (2.31)
(2.31)
где ![]() ;
;
![]() - параметр Лапласа;
- параметр Лапласа;
![]() - модуль сдвига.
- модуль сдвига.
Если искомая деформация тела вызывается заданными принудительными смещениями какой-либо части его поверхности, то граничные условия для уравнений (2.26) формулируют, приравнивая функции u, v,w на границе заданных перемещениям. Сложнее, если на тело действует заданная поверхностная нагрузка ![]() и условия на поверхности выражаются равенствами (2.8) или в сокращенной форме (2.9)
и условия на поверхности выражаются равенствами (2.8) или в сокращенной форме (2.9) ![]() . Последние надо преобразовать, заменив в них напряжения
. Последние надо преобразовать, заменив в них напряжения ![]() через перемещения
через перемещения ![]() , что делается по той же схеме, что и в уравнениях (2.30).
, что делается по той же схеме, что и в уравнениях (2.30).
Помимо двух основных рассмотренных методов решения задач теории упругости в напряжениях и в перемещениях часто используется смешенная форма решения, когда разрешающие уравнения составляются частично относительно перемещений, а частично относительно напряжений. Такой прием применяется в задачах расчета оболочек.
Глава 3. Вариационная формулировка задач теории упругости
3.1. Общие замечания
Рассмотренные в предыдущей главе уравнения механики деформируемого тела вместе с условиями на поверхности образуют законченную формулировку задачи теории упругости в дифференциальной форме. Однако это не единственная возможная формулировка задачи об отыскании напряженно-деформированного состояния тела.
Оказывается, задачу определения функций ![]() ,
, ![]() и
и ![]() , характеризующих это состояние, можно свести к определенному интегралу того или иного вида от этих функций, называемому функционалом, а сами функции, отражающие действительное состояние тела, найти из условия экстремума этого функционала. Математический аппарат такого подхода изучается в разделе математики, называемом вариационным исчислением. Поэтому положения, формулирующие свойства таких функционалов в теории упругости, получили название вариационных принципов.
, характеризующих это состояние, можно свести к определенному интегралу того или иного вида от этих функций, называемому функционалом, а сами функции, отражающие действительное состояние тела, найти из условия экстремума этого функционала. Математический аппарат такого подхода изучается в разделе математики, называемом вариационным исчислением. Поэтому положения, формулирующие свойства таких функционалов в теории упругости, получили название вариационных принципов.
В данной главе прежде всего познакомимся с двумя основными принципами Лагранжа и Кастильяно, а также с некоторыми другими принципами. Укажем на связь этих принципов и вариационной формулировки задачи упругости с дифференциальной формой этой задачи.
На основе вариационных принципов в механике твердых деформируемых тел строятся в настоящее время мощные приближенные методы анализа работы деформируемых тел и систем таких тел. Некоторые из них приводятся ниже и будут рассмотрены далее.
3.2. Энергия деформируемого тела как функционал
Под функционалом понимается скалярная величина, зависящая от некоторой функции или нескольких функций как от аргументов. Она определяется выбором функций-аргументов из некоторого заданного класса, совместимых с условиями задачи. Функционал можно трактовать как функцию, зависящую от бесконечного числа аргументов. Эти аргументы оказываются заданными, как только выбраны функции-аргументы.
В разделе математики, называемом вариационное исчисление, изучаются условия, при которых функционалы обладают свойством локальной экстремальности (стационарности), т. е. при произвольном бесконечно малом изменении функций-аргументов значение функционала не изменяется. Такие функции-аргументы, при которых функционал стационарен, называются экстремалями данного функционала.
Напомним сначала некоторые классические задачи об отыскании экстремалей функционалов.
На рис. 3.1, а заштрихована площадь А, которую охватывает кривая ![]() , имеющая фиксированную длину L между точками В и С. Функционал
, имеющая фиксированную длину L между точками В и С. Функционал
![]() (3.1)
(3.1)
имеет максимум, если кривая ![]() очерчена по окружности, т. е. из всех кривых длиной L, проходящих через точки В и С, экстремалью является часть окружности длиной L. Решение этой задачи было известно еще в древности.
очерчена по окружности, т. е. из всех кривых длиной L, проходящих через точки В и С, экстремалью является часть окружности длиной L. Решение этой задачи было известно еще в древности.
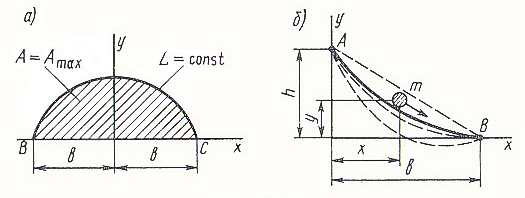
Рис. 3.1
На рис. 3.1, б изображена схема другой известной задачи о так называемой брахистохроне – кривой ![]() , обеспечивающей кратчайшее время соскальзывания под действием силы тяжести точечной массы
, обеспечивающей кратчайшее время соскальзывания под действием силы тяжести точечной массы ![]() (без трения) из точки А в точку В. вертикальная скорость массы
(без трения) из точки А в точку В. вертикальная скорость массы ![]() , поэтому ее горизонтальная скорость будет
, поэтому ее горизонтальная скорость будет  . Отсюда найдем
. Отсюда найдем ![]() и время движения
и время движения ![]() в виде функционала, зависящего от кривой
в виде функционала, зависящего от кривой ![]() :
:
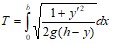 . (3.2)
. (3.2)
Эта задача, поставленная еще Г. Галилеем, была решена различными методами Я. Бернулли, Г. Лейбницем, И. Ньютоном и др. Экстремалью в данном случае является циклоида, образованная качением круга по горизонтальной прямой ![]() . Радиус этого круга зависит от отношения
. Радиус этого круга зависит от отношения ![]() . Интересно, что при
. Интересно, что при ![]() кривая наискорейшего спуска проходит частично несколько ниже оси
кривая наискорейшего спуска проходит частично несколько ниже оси ![]() (нижняя пунктирная линия на рис.3.1,б).
(нижняя пунктирная линия на рис.3.1,б).
Обратимся теперь к функционалу, имеющему важное значение в механике твердого тела, - функционалу, выражающему полную потенциальную энергию деформированного тела и действующей на него нагрузки (рис. 3.2, б). Полная энергия ![]() состоит из потенциальной энергии деформации тела (потенциал внутренних сил) U и энергии внешних сил (потенциал внешних сил)
состоит из потенциальной энергии деформации тела (потенциал внутренних сил) U и энергии внешних сил (потенциал внешних сил) ![]() :
:
![]() . (3.3)
. (3.3)
Условно будем считать, что в начальном недеформированном состоянии ![]() (рис. 3.2, а). Следовательно, полная энергия
(рис. 3.2, а). Следовательно, полная энергия ![]() представляет собой изменение энергии
представляет собой изменение энергии
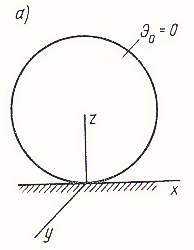
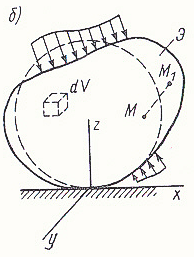
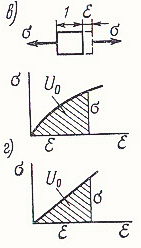
Рис. 3.2
внутренних и внешних сил при переходе тела из начального в деформированное состояние.
Энергия любой системы сил измеряется работой, которую могут совершить эти силы при переводе системы из рассматриваемого состояния в начальное, нулевое, состояние, где принято ![]() . Поэтому при составлении выражения (3.3) будем вычислять энергию как работу внутренних сил упругости (для
. Поэтому при составлении выражения (3.3) будем вычислять энергию как работу внутренних сил упругости (для ![]() ) и внешних сил (для
) и внешних сил (для ![]() ) при мысленном переводе тела из деформированного в начальное недеформированное состояние.
) при мысленном переводе тела из деформированного в начальное недеформированное состояние.
Составим вначале выражение для потенциала внутренних сил ![]() . Так как деформации по объему тела распределены неравномерно, то и энергия деформации в объеме тела распределена так же неравномерно. Введем понятие плотности энергии деформации
. Так как деформации по объему тела распределены неравномерно, то и энергия деформации в объеме тела распределена так же неравномерно. Введем понятие плотности энергии деформации ![]() или удельной потенциальной энергии деформации согласно выражению
или удельной потенциальной энергии деформации согласно выражению
![]() . (3.4)
. (3.4)
Оно показывает, что ![]() – это предел отношения энергии
– это предел отношения энергии ![]() , накопленной в объеме
, накопленной в объеме ![]() , к объему
, к объему ![]() , стремящемуся к нулю. Для однородного деформированного состояния
, стремящемуся к нулю. Для однородного деформированного состояния ![]() выражает энергию, накопленную в единице объема материала.
выражает энергию, накопленную в единице объема материала.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
