

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (2.121)
(2.121)
Тогда скорость точки В будет равна
 (2.122)
(2.122)
Конечно, это уже сложное выражение, но оно позволяет определить скорость точки В при любом угле  поворота 1-го звена (кривошипа). Дальнейшее усложнение механизма затрудняет составление уравнения движения заданной его точки и усложняет аналитический метод определения её скорости. Поэтому в таких случаях используют более простые графоаналитические и графические методы. Применение этих методов оправдывается тем, что обычно требуется знать скорость точки механизма лишь для нескольких положений его ведущего звена
поворота 1-го звена (кривошипа). Дальнейшее усложнение механизма затрудняет составление уравнения движения заданной его точки и усложняет аналитический метод определения её скорости. Поэтому в таких случаях используют более простые графоаналитические и графические методы. Применение этих методов оправдывается тем, что обычно требуется знать скорость точки механизма лишь для нескольких положений его ведущего звена ![]() .
.
Графоаналитические методы определения скоростей точек механизма
Первым и наиболее простым из этих методов является метод определения скоростей точек с помощью мгновенного центра скоростей. Положение мгновенного центра скоростей определятся для любого звена механизма следующим образом. Надо начертить механизм в масштабе и приложить вектор скорости к той точке, анализируемого звена, скорость которой известна по величине и направлению (рис. 2.34).
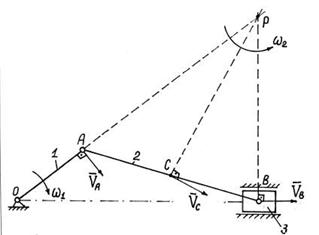
Рис. 2.34. Схема КШМ для определения МЦС 2-го звена
Далее должно быть известно направление вектора скорости ещё одной точки звена. Например, для второго звена (рис. 2.34), известна величина и направление скорости точки А и направление ветора скорости точки В. Чтобы найти положение мгновенного центра скоростей 2-го звена, надо провести перпендикуляры к векторам скоростей точек А и В. Точка пересечения этих перпендикуляров, точка Р, и будет полюсом второго звена или его мгновенным центром скоростей (МЦС).
Так как скорость точки А известна и известно расстояние ![]() от точки А до полюса Р, то угловая скорость
от точки А до полюса Р, то угловая скорость ![]() вращения 2-го звена относительно полюса Р будет равна
вращения 2-го звена относительно полюса Р будет равна  . Поскольку всё второе звено вращается относительно полюса Р с одной и той же угловой скоростью
. Поскольку всё второе звено вращается относительно полюса Р с одной и той же угловой скоростью ![]() , то скорость любой точки второго звена будет равна произведению угловой скорости
, то скорость любой точки второго звена будет равна произведению угловой скорости ![]() на расстояние от этой точки до полюса. Например, скорости точек В и С будут равны соответственно:
на расстояние от этой точки до полюса. Например, скорости точек В и С будут равны соответственно:  ,
,  .
.
Следующий метод определения скоростей точек механизма основан на применении теоремы о равенстве проекций скоростей точек на прямую, соединяющую эти точки. Так, для 2-го звена (рис. 2.35), проекции векторов скоростей точек А и В на прямую АВ будут равны между собой ![]() Так как скорость
Так как скорость ![]() известна, то при известных углах
известна, то при известных углах ![]() и
и ![]() скорость точки В будет равна
скорость точки В будет равна
![]() (2.123)
(2.123)

Рис. 2.35. Схема к равенству проекций скоростей
двух точек А и В 2-го звена на прямую АВ
Наиболее распространённый метод определения скоростей предусматривает построение плана скоростей анализируемых точек механизма. Он применяется для определения скоростей точек сложных механизмов.
Определение скоростей точек звеньев механизма с помощью плана скоростей
На рис. 2.36 показана схема кривошипно-шатунного механизма. Дано: ![]() ,
, ![]() ,
,  , а также - геометрические размеры всех звеньев механизма.
, а также - геометрические размеры всех звеньев механизма.
Найти скорости точек A, B и C с помощью плана скоростей.
Задача решается в такой последовательности.
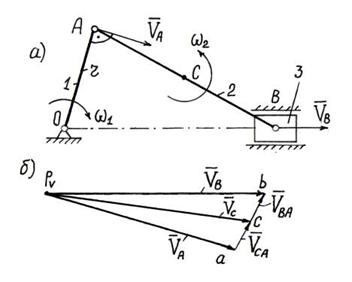
Рис. 2.36. Кривошипно-шатунный механизм: a) схема механизма; б) план скоростей точек
1. Вычерчивают схему механизма в масштабе в том положении его звеньев, для которого необходимо определить скорости точек механизма. Если таких положений несколько, то схему вычерчивают для каждого из них.
2. Нумеруют звенья механизма, рассматривая их как тела.
3. Указывают точки звеньев механизма, скорости которых подлежат определению. Например, точки A, B и C (рис. 2.36).
4. Вычисляют скорость точки A ведущего звена.
Так как ![]() , то
, то ![]() При этом вектор
При этом вектор ![]() направлен в сторону вращения звена 1
направлен в сторону вращения звена 1 ![]()
При определении скоростей точек B и C с помощью плана скоростей составляют для точек B и C векторные уравнения их скоростей. Учитывая, что точки A и B принадлежат второму звену AB и выбирая точку A, скорость которой уже известна, в качестве полюса, для точки B имеем
![]() (2.124)
(2.124)
При этом ![]() , а вектор
, а вектор ![]() направлен вдоль оси цилиндра, то есть горизонтально.
направлен вдоль оси цилиндра, то есть горизонтально.
Взяв точку ![]() (рис. 2.36, б) в качестве полюса, откладываем от нее вектор
(рис. 2.36, б) в качестве полюса, откладываем от нее вектор ![]() с учетом его направления и масштаба. Напомним, что
с учетом его направления и масштаба. Напомним, что  и
и  Далее через точку (а) на плане скоростей проводим линию
Далее через точку (а) на плане скоростей проводим линию ![]() . Вдоль этой линии (ab) направлен вектор
. Вдоль этой линии (ab) направлен вектор ![]() .
.
Теперь обратим внимание на то, что вектор ![]() на плане скоростей направлен вдоль оси цилиндра из полюса
на плане скоростей направлен вдоль оси цилиндра из полюса ![]() . При пересечении с линией ab он образует точку b. Модуль
. При пересечении с линией ab он образует точку b. Модуль ![]() будет равен отрезку Pb, умноженному на масштаб
будет равен отрезку Pb, умноженному на масштаб ![]() плана скоростей, а модуль
плана скоростей, а модуль ![]() Для точки C имеем
Для точки C имеем
![]() (2.125)
(2.125)
Так как ![]() , то вектор
, то вектор ![]() направлен вдоль линии ab. Поскольку AC = 0,5 AB, то точка C на плане скоростей расположена на середине отрезка ab. Вектор
направлен вдоль линии ab. Поскольку AC = 0,5 AB, то точка C на плане скоростей расположена на середине отрезка ab. Вектор ![]() направлен от полюса
направлен от полюса ![]() до точки C на линии ab. Снимая с плана скоростей размеры векторов
до точки C на линии ab. Снимая с плана скоростей размеры векторов ![]() и
и ![]() и умножая их на масштаб, получим величины скоростей точек B и C. Величины скоростей
и умножая их на масштаб, получим величины скоростей точек B и C. Величины скоростей ![]() или
или ![]() позволяют определить угловую скорость
позволяют определить угловую скорость ![]() второго звена
второго звена
 (2.126)
(2.126)
В ряде случаев план скоростей удобнее строить на схеме механизма (рис. 2.37). Если надо определить скорость точки B, то с нее и начинают построение плана скоростей путем графического решения уравнения (2.83).
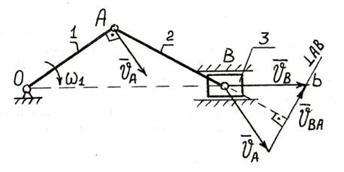
Рис. 2.37. Схема кривошипно-шатунного механизма с планом скоростей
Откладывают в масштабе вектор ![]() скорости точки A. Затем прибавляют к концу вектора
скорости точки A. Затем прибавляют к концу вектора ![]() линию, перпендикулярную AB. Далее из точки B проводят линию, параллельную стенке цилиндра. На пересечении проведенных линий получают точку b, в которой сходятся векторы
линию, перпендикулярную AB. Далее из точки B проводят линию, параллельную стенке цилиндра. На пересечении проведенных линий получают точку b, в которой сходятся векторы ![]() и
и ![]() Умножая величину
Умножая величину ![]() на масштаб
на масштаб ![]() , получим величину скорости точки В.
, получим величину скорости точки В.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
