

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Следовательно, в отличие от случая вращения тела вокруг неподвижной оси, направление вектора ![]() не совпадает с направлением вектора
не совпадает с направлением вектора ![]() .
.
Таким образом, основные кинематические характеристики движения тела вокруг неподвижной точки - векторы ![]() и
и ![]() . Мгновенная угловая скорость будет равна векторной сумме составляющих угловых скоростей
. Мгновенная угловая скорость будет равна векторной сумме составляющих угловых скоростей
 (2.142)
(2.142)
2.4.16. Скорости точек твердого тела, вращающегося вокруг неподвижной точки
Из рис. 2.46 имеем: скорость точки М в соответствии с теоремой Эйлера равна ![]() , а ее модуль определится по формуле
, а ее модуль определится по формуле  Здесь R - кратчайшее расстояние от точки М до мгновенной оси ОР вращения.
Здесь R - кратчайшее расстояние от точки М до мгновенной оси ОР вращения.
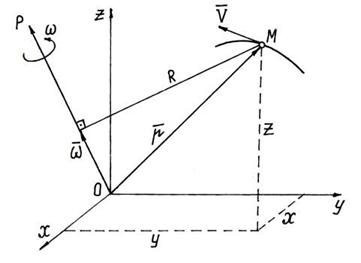
Рис. 2.46. Скорость ![]() точки М тела, вращающегося вокруг неподвижной точки О
точки М тела, вращающегося вокруг неподвижной точки О
Проекции векторного произведения  на оси координат имеют вид:
на оси координат имеют вид:
![]()
![]()

Откуда
![]() (2.143)
(2.143)
2.4.17. Ускорение точек тела, вращающегося вокруг неподвижной точки
Теорема: Ускорение любой точки тела, вращающегося вокруг неподвижной точки, равно векторной сумме вращательного и осестремительного ускорений.
Доказательство.
Возьмем произвольную точку М тела, вращающегося вокруг неподвижной точки О (рис. 2.47). Проведем радиус-вектор из точки О в точку М. Кратчайшее расстояние от нее до векторов ![]() и
и ![]() обозначим через R и h соответственно. Тогда
обозначим через R и h соответственно. Тогда
![]()
(2.144)
где: ![]()
![]()
Векторное произведение ![]() есть вектор
есть вектор ![]() , перпендикулярный одновременно векторам
, перпендикулярный одновременно векторам ![]() и
и ![]() . Он направлен по радиусу R к оси вращения ОР называется осестремительным ускорением
. Он направлен по радиусу R к оси вращения ОР называется осестремительным ускорением ![]() Модуль этого ускорения равен
Модуль этого ускорения равен ![]()
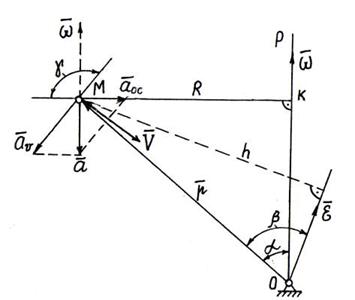
Рис. 2.47. К определению ускорения ![]() точки М тела,
точки М тела,
вращающегося вокруг неподвижной точки О
Векторное произведение ![]() есть вектор
есть вектор ![]() . Это ускорение направлено перпендикулярно к плоскости, образуемой векторами
. Это ускорение направлено перпендикулярно к плоскости, образуемой векторами ![]() и
и ![]() . При этом
. При этом ![]() Его модуль
Его модуль ![]() . Вектор
. Вектор ![]() называют вращательным ускорением.
называют вращательным ускорением.
Таким образом, полное ускорение точки тела, вращающегося вокруг неподвижной точки, равно

 (2.145)
(2.145)
где ![]() - угол между векторами
- угол между векторами ![]() и
и ![]() Когда
Когда ![]() , то
, то
2.4.18. Общий случай движения свободного твердого тела
Пусть свободное твердое тело как угодно перемещается относительно неподвижной системы отсчета ![]() (рис. 2.48).
(рис. 2.48).
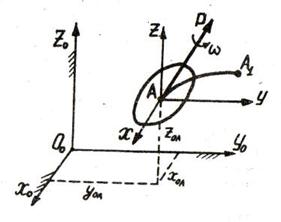
Рис. 2.48. Схема к описанию общего случая движения свободного твердого тела
Положение тела в любой момент времени будет известно в системе отсчета ![]() , если будем знать положение полюса А, то есть, координаты
, если будем знать положение полюса А, то есть, координаты  и положение тела по отношению к осям AXYZ, определяемое углами Эйлера
и положение тела по отношению к осям AXYZ, определяемое углами Эйлера ![]() Тогда уравнения движения свободного тела относительно осей
Тогда уравнения движения свободного тела относительно осей![]() запишутся так:
запишутся так:
![]() ;
; ![]() ;
; ![]() (2.146)
(2.146)
![]()
![]()
![]() (2.147)
(2.147)
Элементарное перемещение свободного твердого тела слагается из поступательного перемещения вместе с полюсом А, при котором оно переходит в положение ![]() и некоторого перемещения по отношению к осям AXYZ, то есть вокруг точки А (как неподвижного полюса). Последнее перемещение согласно теореме Эйлера - Даламбера представляет собой поворот вокруг мгновенной оси вращения АР, проходящей через точку А.
и некоторого перемещения по отношению к осям AXYZ, то есть вокруг точки А (как неподвижного полюса). Последнее перемещение согласно теореме Эйлера - Даламбера представляет собой поворот вокруг мгновенной оси вращения АР, проходящей через точку А.
Следовательно, движение свободного тела слагается в общем случае из поступательного движения, при котором все точки тела движутся как произвольно выбранный полюс А со скоростью ![]() и из серии элементарных поворотов с угловой скоростью
и из серии элементарных поворотов с угловой скоростью ![]() вокруг мгновенных осей вращения, проходящих через полюс А (рис. 2.49).
вокруг мгновенных осей вращения, проходящих через полюс А (рис. 2.49).
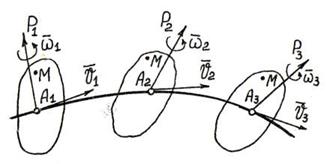
Рис. 2.49. Схема свободного движения твердого тела
Поступательная часть движения тела описывается уравнениями: ![]() ;
; ![]() ;
;![]() а вращение вокруг мгновенной оси вращения, проходящей через полюс, уравнениями:
а вращение вокруг мгновенной оси вращения, проходящей через полюс, уравнениями: ![]()
![]()

Основные кинематические характеристики такого движения – скорость ![]() и ускорение
и ускорение ![]() полюса, а также угловая скорость
полюса, а также угловая скорость ![]() и угловое ускорение
и угловое ускорение ![]() во вращательном движении.
во вращательном движении.
Скорость точки М свободно движущегося тела складывается из скорости ![]() полюса А и скорости
полюса А и скорости ![]() , которую получает точка М при движении вместе с телом вокруг полюса А, то есть,
, которую получает точка М при движении вместе с телом вокруг полюса А, то есть, ![]() Поскольку
Поскольку ![]() то
то  .
.
Ускорение точки M тела определяется аналогично:
 (148)
(148)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
