

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
причем
![]() (2.137)
(2.137)
Следовательно, ускорение любой точки тела при плоском движении равно ее ускорению во вращательном движении вокруг мгновенного центра ускорений Q. При этом
![]() , (2.138)
, (2.138)
то есть ускорения точек тела пропорциональны их расстояниям от мгновенного центра ускорений.
Положение мгновенного центра скоростей P и мгновенного центра ускорений Q в данный момент времени в общем случае не совпадают.
Если колесо (рис. 2.41) катится по горизонтальной плоскости равномерно без скольжения, то мгновенный центр ускорений Q совпадает с центром колеса, а мгновенный центр скоростей - с точкой касания P.
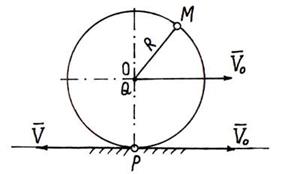
Рис. 2.41. Мгновенный центр P скоростей и мгновенный центр ускорений Q
кольца - в точке O, когда ![]()
Мгновенные центры скоростей P и ускорений Q совпадают тогда, когда тело вращается вокруг неподвижной оси или неподвижного центра.
2.4.14. Движение твердого тела вокруг неподвижной точки
Классическим примером движения тела, имеющего одну неподвижную точку, является сложное вращение волчка. Каким же образом описать это вращение? Какими параметрами? Свяжем с неподвижной точкой О неподвижную систему отсчета ![]() , а с самим волчком (телом) – подвижную XYZ, с началом в точке О.
, а с самим волчком (телом) – подвижную XYZ, с началом в точке О.
В процессе движения тела точка О остается все время неподвижной, а подвижные оси XYZ, связанные жестко с телом, все время меняют свое положение относительно неподвижных осей  (рис. 2.42).
(рис. 2.42).
Мы знаем, что положение одной подвижной оси (как и вектора) можно описать относительно неподвижных осей тремя направляющими косинусами. Естественно, что положение трех осей OX, OY и OZ будет описываться в этом случае девятью направляющими косинусами. Девять уравнений - это громоздко.
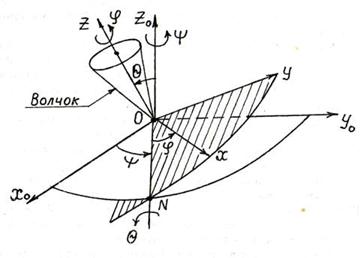
Рис. 2.42. Схема к описанию движения твердого тела вокруг неподвижной точки О
Л. Эйлер предложил описать положение подвижных осей, а следовательно, и положение тела, тремя углами (рис. 2.42):
Угол ![]() - угол прецессии.
- угол прецессии.
Угол ![]() - угол нутации.
- угол нутации.
Угол ![]() - угол собственного вращения.
- угол собственного вращения.
При этом линия ON образуется пересечением координатной плоскости XOY с неподвижной плоскостью ![]() и называется линией узлов.
и называется линией узлов.
Положительные направления отсчета углов показаны на рис. 2.42 стрелками. Действительно, при повороте на элементарный угол ![]() тело повернется вокруг оси
тело повернется вокруг оси ![]() . При изменении угла
. При изменении угла ![]() на величину
на величину ![]() тело повернется вокруг линии узлов ON. При изменении угла
тело повернется вокруг линии узлов ON. При изменении угла ![]() тело повернется вокруг собственной оси OZ на угол
тело повернется вокруг собственной оси OZ на угол ![]() .
.
Таким образом, три угла ![]() и
и ![]() описывают перемещение тела вокруг двух осей
описывают перемещение тела вокруг двух осей ![]() и линии узлов ON и, следовательно, определяют его положение в любой момент времени. Поскольку тело, имеющее одну неподвижную точку, описывается тремя углами, то оно имеет три степени свободы.
и линии узлов ON и, следовательно, определяют его положение в любой момент времени. Поскольку тело, имеющее одну неподвижную точку, описывается тремя углами, то оно имеет три степени свободы.
Уравнения ![]()
![]() и
и ![]() являются законом движения твердого тела, имеющего одну неподвижную точку. Описание такого движения тела базируется на теореме Эйлера - Даламбера:
являются законом движения твердого тела, имеющего одну неподвижную точку. Описание такого движения тела базируется на теореме Эйлера - Даламбера:
Всякое элементарное перемещение тела, имеющего неподвижную точку, представляет собой элементарный поворот вокруг некоторой мгновенной оси вращения, проходящей через эту точку.
Пусть положение тела определяется углами  тогда за элементарный промежуток времени
тогда за элементарный промежуток времени ![]() элементарное перемещение тела будет характеризоваться совокупностью элементарных поворотов на углы
элементарное перемещение тела будет характеризоваться совокупностью элементарных поворотов на углы ![]() и
и ![]()
вокруг осей ![]() и
и ![]() соответственно. Слагаясь, эти перемещения дадут истинное элементарное перемещение тела.
соответственно. Слагаясь, эти перемещения дадут истинное элементарное перемещение тела.
Рассмотрим вначале результат сложения вращений вокруг осей ![]() и
и ![]() (рис. 2.43). Между осями OZ и
(рис. 2.43). Между осями OZ и ![]() всегда существует такая точка В, для которой
всегда существует такая точка В, для которой
![]() . (2.139)
. (2.139)
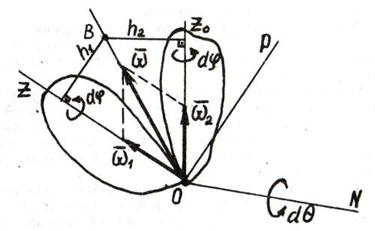
Рис. 2.43. К определению мгновенной оси ОР вращения
Следовательно, скорости точки В относительно осей ![]() и
и ![]() равны по величине и противоположно направлены. Поэтому их сумма равна нулю. Скорости всех точек
равны по величине и противоположно направлены. Поэтому их сумма равна нулю. Скорости всех точек
на линии ОВ также равны нулю в данный момент времени. Следовательно, OB - мгновенная ось вращения.
При вращении ОВ вокруг осей ![]() и
и ![]() получим два конуса-аксоида: подвижный 1 и неподвижный 2 (рис. 2.44). Абсолютное движение тела - качение подвижного аксоида 1 по неподвижному 2.
получим два конуса-аксоида: подвижный 1 и неподвижный 2 (рис. 2.44). Абсолютное движение тела - качение подвижного аксоида 1 по неподвижному 2.
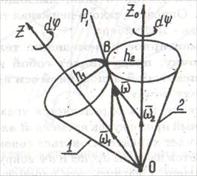
Рис. 2.44. Подвижный - 1 и неподвижный 2 аксоиды
Рассуждая аналогично, найдем, что элементарные перемещения вокруг осей OB и ON (рис. 2.43) эквивалентны элементарному повороту вокруг некоторой оси ОР, проходящей через точку.
Ось ОР, элементарным поворотом вокруг которой тело перемещается из одного положения в соседнее, бесконечно близкое к данному, называется мгновенной осью вращения.
Скорости всех точек, лежащих в данный момент времени на мгновенной оси вращения, равны нулю.
Таким образом, элементарное перемещение твердого тела вокруг неподвижной точки слагается из серии последовательных элементарных поворотов вокруг мгновенных осей вращения, проходящих через эту неподвижную точку.
2.4.15. Кинематические характеристики движения твердого тела вокруг неподвижной точки
Угловая скорость, с которой тело совершает элементарный поворот вокруг мгновенной оси вращения ОР, называется угловой скоростью в данный момент времени или мгновенной угловой скоростью. Ее изображают соответствующим вектором ![]() (рис. 2.45).
(рис. 2.45).
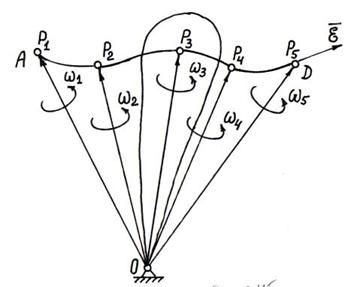
Рис. 2.45. К определению направления вектора
мгновенной угловой скорости ![]() и мгновенного углового ускорения
и мгновенного углового ускорения ![]()
Поскольку направление оси ОР все время меняется, то вектор ![]() изменяется со временем и по величине и по направлению, а его конец описывает в пространстве некоторую кривую AD - годограф вектора
изменяется со временем и по величине и по направлению, а его конец описывает в пространстве некоторую кривую AD - годограф вектора ![]() (рис. 2.45).
(рис. 2.45).
Мгновенное угловое ускорение ![]() определяет в данном случае изменение вектора
определяет в данном случае изменение вектора ![]() и по величине и по направлению. Поэтому
и по величине и по направлению. Поэтому ![]() - величина векторная (рис. 2.45). Она определяется по формуле
- величина векторная (рис. 2.45). Она определяется по формуле
 (2.140)
(2.140)
Сравнивая (2.140) с выражением вектора скорости
 (2.141)
(2.141)
замечаем, что угловое ускорение ![]() можно вычислить как скорость, с которой конец вектора
можно вычислить как скорость, с которой конец вектора ![]() перемещается вдоль кривой AD. Направление вектора
перемещается вдоль кривой AD. Направление вектора ![]() совпадает с направлением касательной к кривой AD в соответствующей точке.
совпадает с направлением касательной к кривой AD в соответствующей точке.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
