

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2.4.12. Определение ускорений точек КШМ
Нетрудно видеть, что ускорение точки В (рис. 2.33), равное производной от выражения (2.122) значительно усложняется и это в условиях, когда анализируется работа простейшего кривошипно-шатунного механизма (КШМ). Поэтому для определения ускорений точек механизма обычно использую план скоростей. Его можно строить отдельно (рис. 2.38) от механизма или вместе с ним (рис. 2.39).
В качестве примера вновь возьмем кривошипно-шатунный механизм. Для определения ускорений его точек начертим сам механизм в масштабе в заданном положении (рис. 2.38, а). При этом известно, что  , AC = BC. Составим и решим графически векторные уравнения ускорений точек A, B и C механизма (рис. 2.38, а).
, AC = BC. Составим и решим графически векторные уравнения ускорений точек A, B и C механизма (рис. 2.38, а).
Выбирая точку О в качестве полюса, для точки А имеем


![]() (2.127)
(2.127)
Здесь 
![]() также равно нулю, так как
также равно нулю, так как ![]() , поэтому
, поэтому

Вектор ![]() на плане ускорений (рис. 2.38, б) уже имеется. Модуль вектора
на плане ускорений (рис. 2.38, б) уже имеется. Модуль вектора  и направлен
и направлен ![]() (параллельно AB) от точки В к точке А.
(параллельно AB) от точки В к точке А.
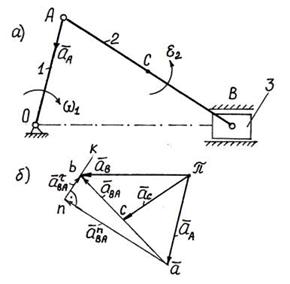
Рис. 2.38. Схема механизма и план ускорений его точек
Угловую скорость ![]() определим, основываясь на данных из плана скоростей (рис. 2.36, б), по формуле
определим, основываясь на данных из плана скоростей (рис. 2.36, б), по формуле
 . (2.129)
. (2.129)
Тогда ![]() Проводя через точку a на плане ускорений (рис. 2.38, б) линию, параллельную звену AB и откладывая на ней отрезок
Проводя через точку a на плане ускорений (рис. 2.38, б) линию, параллельную звену AB и откладывая на ней отрезок ![]() соответствующий направлению нормального ускорения от точки В к точке А, получим точку n.
соответствующий направлению нормального ускорения от точки В к точке А, получим точку n.
Откладываем от полюса ![]() (рис. 2.38, б) в масштабе вектор
(рис. 2.38, б) в масштабе вектор ![]() , который направлен от точки А к точке О.
, который направлен от точки А к точке О.
Составим векторное уравнение ускорения точки B, взяв в качестве полюса точку А, ускорение ![]() которой известно.
которой известно.
 (2.128)
(2.128)
Далее нам известно, что вектор ![]() . Это дает основание провести через точку n линию
. Это дает основание провести через точку n линию ![]() . Модуль
. Модуль ![]() нам не известен, так как не известно угловое ускорение
нам не известен, так как не известно угловое ускорение ![]() второго звена. Однако нам известно, что вектор ускорения точки B направлен вдоль оси цилиндра. Проводя из полюса
второго звена. Однако нам известно, что вектор ускорения точки B направлен вдоль оси цилиндра. Проводя из полюса ![]() линию || оси цилиндра до пересечения с линией nk, получим точку b. Следовательно,
линию || оси цилиндра до пересечения с линией nk, получим точку b. Следовательно, ![]() Соединяя точки a и b, получим вектор
Соединяя точки a и b, получим вектор ![]() полного относительного ускорения точки B вокруг полюса A.
полного относительного ускорения точки B вокруг полюса A.
Так как точка C расположена на середине AB, то на плане ускорений она будет на середине вектора ![]() , а отрезок
, а отрезок ![]() .
.
Таким образом, определены ускорения всех точек A, B и C механизма в заданном его положении. При этом появилась возможность определить и угловое ускорение ![]() второго звена (AB).
второго звена (AB).
 (2.130)
(2.130)
Иногда план ускорений точек механизма удобнее строить на схеме механизма. Например, для определения ускорения точки B (рис. 2.38) кривошипно-шатунного механизма план ускорений строят на плане механизма, начиная с точки B. На рис. 2.39 показан пример построения плана ускорений точки B на схеме механизма путем графического решения уравнения (2.128).
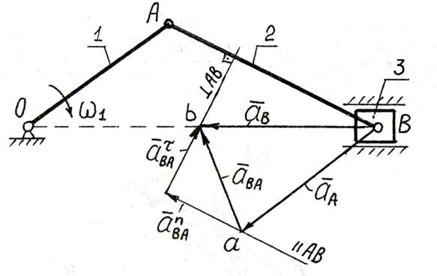
Рис. 2.39. Схема КШМ и плана ускорений его точек
Если возникает необходимость знать скорости и ускорения точек механизма в другом положении его звеньев, то вновь вычерчивается схема механизма в новом положении и процесс определения скоростей и ускорений точек механизма повторяется.
В практике иногда требуется знать скорости и ускорения точек звеньев механизма при любом их положении, поэтому применение графоаналитического способа становится весьма трудоемким делом.
Чтобы избавиться от этого недостатка, надо составить уравнения движения точек механизма в системе отсчета, связанной с началом (точкой О) ведущего звена, и с помощью ЭВМ определить скорости и ускорения точек механизма.
В принципе возможно создание автоматизированной системы, которая бы графоаналитическим методом определяла скорости и ускорения точек механизма для любых положений его звеньев.
При решении некоторых задач можно воспользоваться мгновенным центром ускорений.
2.4.13. Мгновенный центр ускорений
При поступательном движении тела в его сечении (S) в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений (рис. 2.40).
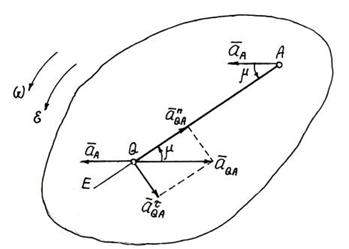
Рис. 2.40. Схема к определению мгновенного центра ускорений
Положение центра Q можно определить, если известны: ускорение ![]() какой-нибудь точки A тела и величины
какой-нибудь точки A тела и величины ![]() и
и ![]() . Положение Q определяют в такой последовательности (рис. 2.40):
. Положение Q определяют в такой последовательности (рис. 2.40):
1. Вычисляют величину угла ![]()
![]() (2.131)
(2.131)
2. Если вращение ускоренное, то угол ![]() откладывают в сторону вращения от вектора
откладывают в сторону вращения от вектора ![]() , а если замедленное, то - против, то есть всегда в сторону направления углового ускорения
, а если замедленное, то - против, то есть всегда в сторону направления углового ускорения ![]() Далее откладывают по лучу AE отрезок (рис. 2.40)
Далее откладывают по лучу AE отрезок (рис. 2.40)
 (2.132)
(2.132)
Построенная таким образом точка Q и будет мгновенным центром ускорений. В самом деле, если взять за полюс точку А, то для точки Q можем записать
![]() (2.133)
(2.133)
Модуль ускорения
![]() (2.134)
(2.134)
Учитывая, что
 , (2.135)
, (2.135)
найдем ![]()
Вектор ![]() должен образовать с прямой AE угол
должен образовать с прямой AE угол ![]() , следовательно,
, следовательно, ![]() . Далее направление вектора
. Далее направление вектора ![]()
совпадает с направлением углового ускорения ![]() , то есть на рис. 2.40 вектор
, то есть на рис. 2.40 вектор ![]() направлен в сторону, противоположную вектору
направлен в сторону, противоположную вектору ![]() . Следовательно,
. Следовательно, ![]() . Поэтому ускорение точки Q равно нулю
. Поэтому ускорение точки Q равно нулю
![]()
Если точку Q взять за полюс, то в силу того, что ![]() ускорение любой точки M тела, согласно формулам будет
ускорение любой точки M тела, согласно формулам будет
![]() (2.136)
(2.136)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
