

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где Т – индекс транспонирования.
Для стержня, материал которого имеет диаграмму деформирования Прандтля (см. рис. 6.46), компоненты вектора (6.265) ![]() определяются по формулам (6.237).
определяются по формулам (6.237).
Для достаточно короткого КЭ можно считать, что дополнительные усилия (6.237) меняются по его длине линейно, что позволяет считать дополнительные распределенные нагрузки, определяемые формулой (6.245), равными нулю.
Таким образом, расчет стержневых систем кранов МКЭ [199, 225, 322] за пределом упругости (6.264) сводится к расчету эквивалентной линейно-упругой системы (6.251), загруженной дополнительными усилиями в узлах (6.237), но имеющей такие же перемещения и деформации как упругопластическая стержневая система.
В заключение построим алгоритм расчета несущей способности пространственных стержневых систем металлоконструкций кранов, составленных из тонкостенных стержней. При решении задачи используется МКЭ совместно с методом "упругих" решений [199, 225, 318, 320].
Составление уравнений равновесного состояния (6.264) пространственных металлоконструкций производится на основе выражений для компонентов матрицы жесткости тонкостенного стержня (6.257) – (6.259). При этом учитывается влияние продольных сил на изгибные и крутильные деформации, закручивания - на изгибающие моменты, прогибов – на кручение стержней и т. д.
В общем случае алгоритм определения несущей способности пространственной стержневой металлоконструкции крана осуществляется по следующей схеме:
1. На первом шаге функция пластичности, а также дополнительные усилия (6.237) принимаются равными нулю. Определяются узловые перемещения, вычисляются интенсивность деформаций ei и границы зон распространения пластичности 0 типа (6.246), (6.248), (6.249).
2. С учетом характера диаграммы ![]() определяется интенсивность напряжений si, функция пластичности (6.234) и во втором приближении для пластических областей вычисляются дополнительные усилия (6.237). После чего стержни металлоконструкций крана, помимо заданных внешних сил, загружаются дополнительными усилиями в узлах (6.237). Расчет в третьем из следующих приближений сводится к последовательному решению линейных задач.
определяется интенсивность напряжений si, функция пластичности (6.234) и во втором приближении для пластических областей вычисляются дополнительные усилия (6.237). После чего стержни металлоконструкций крана, помимо заданных внешних сил, загружаются дополнительными усилиями в узлах (6.237). Расчет в третьем из следующих приближений сводится к последовательному решению линейных задач.
3. По мере приближения параметра нагрузки к критическому, при котором металлоконструкции крана исчерпывает свою несущую способность, сходимость итерационного процесса замедляется. Наконец, при некотором значении параметра нагрузки S, близком к SНС, нарушается единственность решения системы уравнений (6.264) и процесс в рамках метода последовательных приближений начинает расходиться. За численное значение несущей способности металлоконструкций крана принимается величина
![]() , (6.266)
, (6.266)
где Sr – наибольшее значение параметра нагрузки Sr, при котором итерационный процесс еще сходится; DSr – добавка, при которой процесс последовательных приближений начинает расходиться.
Сначала рассмотрим геометрически нелинейную задачу, в которой нелинейность порождена изменением геометрии стержневой системы при ее деформировании. Для ее решения используется программный комплекс МКЭ решения линейных задач. При этом деформационный расчет проводится по методу последовательных приближений [60, 192, 199, 225].
Математическая модель деформационного расчета МКЭ имеет вид матричного уравнения статического равновесия системы [316] n-го порядка
![]() (6.251)
(6.251)
где [К] – матрица жесткости конструкции порядка 7u ´ 7u (u – число узлов расчетной модели крана n = 7u); {V} и {R} – векторы порядка 7u обобщенных неизвестных перемещений узлов и грузовых членов. Векторы, соответственно, обобщенных перемещений и внутренних узловых усилий произвольного конечного элемента (КЭ) jk в местной системе координат oxyz обладают структурой:
![]() ; (6.252)
; (6.252)
![]() , (6.253)
, (6.253)
где dx (y, z) – линейные перемещения узла; ax(y) – углы поворота; Qz и ![]() – угол закручивания и производная от угла закручивания (депланация). Указанному в (6.253) вектору деформационных воздействий соответствуют внутренние усилия: Qx(y), Qz – поперечные (перерезывающие) силы; Mx (y) – изгибающие моменты; Mz, B – крутящий момент и бимомент; надстрочные индексы j и k в (6.252) и (6.253) обозначают номер узлов расчетной модели крана, подстрочные x, y и z – оси местной системы координат; Т – индекс транспонирования.
– угол закручивания и производная от угла закручивания (депланация). Указанному в (6.253) вектору деформационных воздействий соответствуют внутренние усилия: Qx(y), Qz – поперечные (перерезывающие) силы; Mx (y) – изгибающие моменты; Mz, B – крутящий момент и бимомент; надстрочные индексы j и k в (6.252) и (6.253) обозначают номер узлов расчетной модели крана, подстрочные x, y и z – оси местной системы координат; Т – индекс транспонирования.
Матрицу жесткости отдельного КЭ jk в общей системе координат OXYZ получают по матричной формуле
![]() , (6.254)
, (6.254)
где [T] – диагональная матрица 14´14 преобразования координат jk КЭ;
![]() é
é û; (6.255)
û; (6.255)
[l] – известная матрица направляющих косинусов [60, 192];  – деформационная матрица жесткости КЭ jk в местной системе координат oxyz порядка 14´14 {225, 319].
– деформационная матрица жесткости КЭ jk в местной системе координат oxyz порядка 14´14 {225, 319].
 . (6.256)
. (6.256)
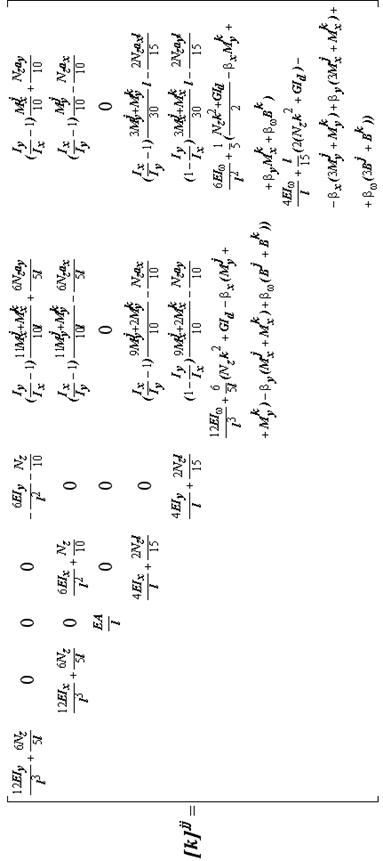
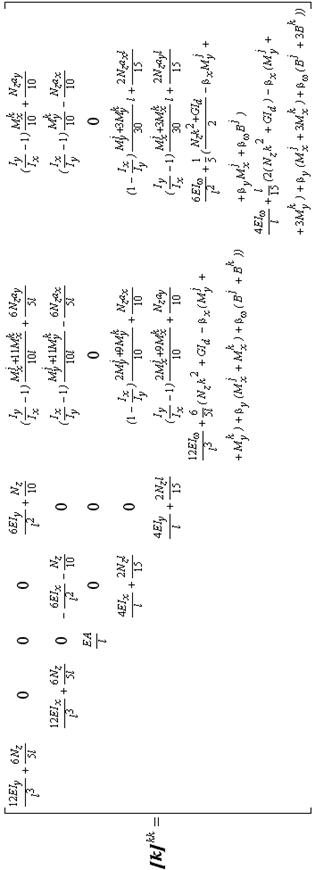
Для конечного элемента jk, жестко защемленного по концам матрицы [K]jj, [K]jk, [K]kk порядка 7´7 приведены в формулах (6.257) – (6.259)).
При определении элементов матрицы жесткости (6.256) внутренние усилия принимались меняющимися по линейному закону. Это соответствует приложению внешней нагрузки только в узлах.
Значения элементов деформационной матрицы жесткости ![]() (6.256) зависят не только от жесткостных параметров КЭ и принятого закона изменения компонентов перемещений, но и от внутренних усилий:
(6.256) зависят не только от жесткостных параметров КЭ и принятого закона изменения компонентов перемещений, но и от внутренних усилий:  и
и ![]() (6.253). В качестве аппроксимирующих функций перемещений межузловых сечений КЭ в (6.256) приняты функции Эрмита[225, 322].
(6.253). В качестве аппроксимирующих функций перемещений межузловых сечений КЭ в (6.256) приняты функции Эрмита[225, 322].
С учетом (6.254) полная матрица [К] n-порядка, где n – число степеней свободы расчетной модели крана в уравнении (6.251) формируется по принципу суперпозиций
 , (6.260)
, (6.260)
где ![]() – матрица порядка 7u´7u, полученная дополнением нулями матрицы (6.254); s – число КЭ в расчетной модели конструкции крана, по которому осуществляется суммирование от jk > 1 до jk = S в (6.260).
– матрица порядка 7u´7u, полученная дополнением нулями матрицы (6.254); s – число КЭ в расчетной модели конструкции крана, по которому осуществляется суммирование от jk > 1 до jk = S в (6.260).
Полный вектор грузовых членов {R} n-го порядка в уравнении (6.251) получают из векторов n-го порядка (n = 7u)
![]() , (6.261)
, (6.261)
где {Rc} – вектор известных внешних узловых сосредоточенных нагрузок порядка 7u и совпадающих с направлением обобщенных перемещений в общей системе координат OXYZ; {Rq}OXYZ – вектор приведенных узловых внешних нагрузок порядка 7u, обусловленный местной внешней нагрузкой на КЭ и собственным весом металлоконструкций крана, приложенными между узлами j и k
(6.257) |
|
(6.258) |
|
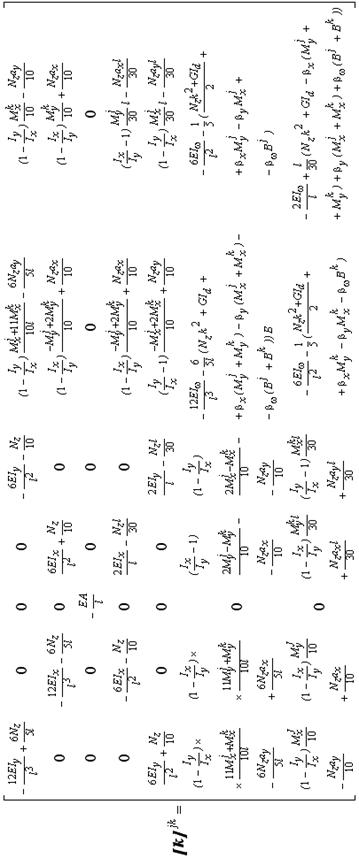
(6.259) |
|
по длине КЭ jk. Для отдельного КЭ jk этот вектор имеет вид
![]() . (6.262)
. (6.262)
Компоненты вектора (6.262), полученные через потенциал внешних сил для линейно меняющейся распределенной нагрузки от ![]() в начале КЭ jk до
в начале КЭ jk до ![]() в конце в местной системе координат oxyz, вычисляют по формулам (6.263) [225, 323]:
в конце в местной системе координат oxyz, вычисляют по формулам (6.263) [225, 323]:
![]() (6.263)
(6.263)
В формулах (6.263) еx(y) – эксцентриситет приложения распределенной нагрузки; wс – секториальная координата точки приложения распределенной нагрузки.
Алгоритм деформационного статического расчета пространственных тонкостенных металлоконструкций грузоподъемных кранов реализован на ЭВМ [60, 192, 199, 320, 321].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
