

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (6.67)
(6.67)
Из рассмотрения приведенных выше формул (6.59), (6.64) следует, что определение Мw и Bw, а, следовательно, и напряжений tw и sw из (6.61), (6.66) не может быть осуществлено исходя только из уравнений равновесия.
Для вычисления всех указанных факторов требуется иметь уравнение угла закручивания
Q = f (z). (6.68)
Это обстоятельство также является одной из характерных особенностей расчета тонкостенных стержней, работающих в условиях стесненного кручения.
6.4.5. Дифференциальное уравнение угла закручивания стержня
Для составления уравнения угла закручивания стержня (6.68) используют условие (6.16), связывающее внешние и внутренние моменты при стесненном кручении (рис. 6.16):
 (6.69)
(6.69)
где Мz – момент внешних сил относительно центра изгиба А стержня.
Рис. 6.16. Тонкостенный стержень под действием
распределенного крутящего момента
Подставляя в приведенное равенство (6.69) значение Мw из формулы (6.59) и значение М0 из формулы (6.3), найдем:
 ,
,
или
 . (6.70)
. (6.70)
Продифференцировав выражение (6.70) по z, получим:
 (6.71)
(6.71)
Производная в правой части уравнения (6.71) представляет собой интенсивность т внешнего распределенного по стержню вдоль оси Оz крутящего момента (см. рис. 6.16):
 (6.72)
(6.72)
Эту зависимость легко понять из условия, в соответствии с которым внешний момент на участке z может быть выражен так:
 (6.73)
(6.73)
Разделим уравнение (6.71) почленно на EJw и введем обозначение для изгибно-крутильной характеристики тонкостенного стержня открытого профиля
 (6.74)
(6.74)
После чего с учетом формулы (6.7253) получим дифференциальное уравнение угла закручивания тонкостенного стержня открытого профиля
 (6.75)
(6.75)
6.5. Математическая модель стесненного кручения тонкостенных стержней замкнутого (закрытого) профиля
Дадим окончательные результаты без вывода [313, 320]. Дифференциальное уравнение стесненного кручения тонкостенного стержня замкнутого профиля имеет вид
 . (6.76)
. (6.76)
В формуле (6.76)
 , (6.77)
, (6.77)
– коэффициент депланации;
![]() , (6.78)
, (6.78)
– направленный полярный момент инерции;
Bw(z) – функция, называемая бимоментом, равным
![]() (6.79)
(6.79)
где f(z) – функция, называемая мерой депланации;
 (6.80)
(6.80)
![]() , (6.81)
, (6.81)
– секториальный момент инерции, (бимомент инерции).
В (6.76) mk – интенсивность внешнего распределенного крутящего момента, приложенного к стержню (см. аналогично рис. 6.16).
В формуле (6.81) в отличие от (6.33) v – обобщенная секториальная площадь (координата) тонкостенного стержня замкнутого профиля:
 . (6.82)
. (6.82)
В формуле (6.82): wk – удвоенная площадь ограниченная контуром сечения;
![]() , (6.83)
, (6.83)
– приведенная длина контура;
 , (6.84)
, (6.84)
– приведенная длина дуги контура.
Нормальные напряжения в тонкостенном стержне замкнутого профиля определяют по формуле аналогично (6.66)
 . (6.85)
. (6.85)
Касательные напряжения при стесненном кручении тонкостенного стержня замкнутого профиля определяются по формуле, аналогичной (6.61):
 , (6.86)
, (6.86)
где приведенный (обобщенный) секториально-статический момент сечения тонкостенного стержня замкнутого профиля ![]() определяется по формуле:
определяется по формуле:
 (6.87)
(6.87)
Крутящий момент стесненного кручения и относительный угол закручивания определяются из формул:
 ; (6.88)
; (6.88)
 , (6.89)
, (6.89)
где f(z) – мера депланации тонкостенных стержней замкнутого профиля определяется по формуле (6.80); коэффициент m – см. формулу (6.77).
6.6. Математическая модель геометрических характеристик тонкостенных стержней
6.6.1. Определение положения центра изгиба Аn
Как было показано ранее, сечение стержня при кручении поворачивается как жесткий диск вокруг некоторого полюса в точке Аn, которую называют также центром кручения. При этом внешняя поперечная сила, например, сила Р (рис. 6.17) тем больше будет закручивать стержень, чем больший момент она создает относительно точки Аn.
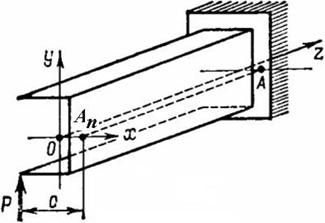
Рис. 6.17. Положение центра изгиба тонкостенного стержня
Если сила Р проходит через точку Аn, то закручивающий момент равен нулю, а, следовательно, поворота сечений не произойдет и стержень будет испытывать только деформацию изгиба.
Поэтому полюс Аn, или центр кручения, является также и центром изгиба. Для определения координат центра изгиба Аn используем выражения (6.15), из которых получим:
 ; (6.90)
; (6.90)
 (6.91)
(6.91)
Первое выражение (6.90) после подстановки в него значений для sw из (6.66) запишется так:
 (6.92)
(6.92)
Интеграл в левой части (6.92) называется секториально-линейным статическим моментом сечения относительно оси Ох и обозначается через Swх.
Новая геометрическая характеристика сечения (6.92) измеряется в сантиметрах в пятой степени (см5), м5 и др. Учитывая, что  в (6.92), получим:
в (6.92), получим:
 (6.93)
(6.93)
Выражение (6.91) после аналогичной подстановки в него sw, соответственно, дает:
 , (6.94)
, (6.94)
которое называют также секториально-линейным статическим моментом сечения относительно оси Оу.
Выражения (6.93) и (6.94) и будут теми условиями, которые позволяют определить координаты секториального полюса Аn (или центра изгиба).
Рассмотрим произвольное сечение (рис. 6.18), главные центральные оси которого совместимы с осями Ох и Оу . Подобно тому, как при отыскании центра тяжести берется произвольная ось и от нее определяется расстояние до центральной оси, выберем произвольный полюс В и положение центра изгиба будем определять относительно указанного полюса отрезками aх и aу (см. формулы (6.104) и (6.106)).
Наметим на профиле сечения любую точку т и проведем к ней касательную, угол наклона которой к вертикали обозначим через b. Элементарная секториальная площадь, определяющая секториальную координату точки т при полюсе В, равна
 (6.95)
(6.95)
а при полюсе А
 . (6.96)
. (6.96)
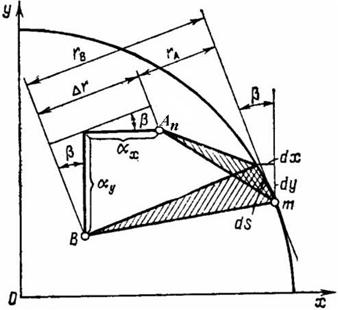
Рис. 6.18. Вычисление координат центра изгиба тонкостенного стержня
Разность этих площадей можно выразить следующим образом:
 (6.97)
(6.97)
или, выражая Dr через отрезки aх и aу, согласно рис. 6.18, получим:
 (6.98)
(6.98)
Учитывая далее, что
 и
и  (6.99)
(6.99)
получим после сокращения на ds:
 (6.100)
(6.100)
Интегрируя полученное равенство (6.100) и добавляя произвольную постоянную С, имеем:
 (6.101)
(6.101)
откуда
 (6.102)
(6.102)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
