
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Используем угловые скобки для обозначения координат.
Из свойств линейности угловых скобок по второму аргументу и линейности оператора А
следует: βi = бfi, yс = бfi, Аxс = бfi
А(α1e1 + α2e2 + … + αnen)с= бfi
α1Аe1 + α2Аe2 + … + αnАenс = α1 бfi
Аe1с + α2 бfi, Аe2с + … αn бfi, Аenс
Так как в последнем выражении в угловых скобках стоят числа, обозначим их
aik = бfi, Аekс, (i = 1, … , m, k = 1, … , n). |
Очевидно, что aik — i –ая координата образа k –ого базисного вектора.
Окончательно получаем искомое выражение координат образа через координаты прообраза
n | aikαk |
∑ | |
k = 1 |
βi =
i = 1, … , m
Итак, действие линейного оператора А : Xn → Ym определяется набором из m × n чисел, которые удобно располагать в виде прямоугольной таблицы, состоящей из m строк и n столбцов.
Теперь дадим определение матрицы линейного оператора:
Матрицей линейного оператора А: Xn → Ym в базисах e1, e2, … , en и f1, f2, … , fm называется матрица размера m × n , у которой
1) столбцы определяются как координатные столбцы образов базисных векторов пространства
Xn :Аe1, Аe2, … , Аen в базисе пространства Ym ;
2) строки определяются как коэффициенты в выражении координат образа произвольного вектора через координаты самого этого вектора.
Матрицы мы будем обозначать теми же буквами, что и операторы (только без крышки):
A = (aik) = | ж |
| ц | |||||||||||||||||
Замечания.
1. Пользуясь определением, можно строить матрицу оператора любым из двух способом (по строкам или по столбцам).
2. Количество столбцов матрицы линейного оператора
А : Xn → Ym равно размерности исходного пространства Xn , а количество строк — размерности пространства Ym .
3. Как в случае векторов мы можем, фиксировав базис, вместо абстрактного линейного пространства, оперировать с координатным пространством (т. е. с наборами чисел), так и в случае линейных (и только линейных!) операторов мы можем оперировать с их матрицами (т. е. с таблицами чисел).
4. Если оператор А отображает пространство Xn в Xn , то оба базиса совпадают и матрица оператора А (квадратная) определяется заданием одного базиса.
8. Изменение матрицы линейного отображения при смене базисов
Пусть задан линейный оператор A: F → F, действующий в n-мерном про-
странстве F. Если в F задан базис, то можно использовать координатное пред-
ставление оператора и свести исследование оператора к исследованию его мат-
рицы. Однако эта матрица существенно зависит от выбора базиса, чем удачнее
выбран базис, тем она проще, тем проще работа с оператором. Как выбрать
удобный базис?
Для реализации правильного выбора посмотрим, как меняются координа-
ты вектора и матрица оператора при смене базиса.
Пусть в пространстве F имеются два базиса:
e1, e2,…, en; (1)
e1′, e2′,…, en′; (1')
Каждый вектор базиса (1') можно разложить по первому базису, записав:
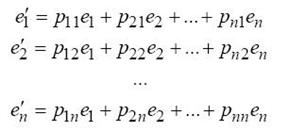
(2)
Эти формулы преобразования базиса полностью определяются задани-
ем матрицы
(3)
называемой матрицей перехода от базиса (1) к базису (1'). Каждый j–столбец
этой матрицы состоит из координат вектора ej′ в базисе (1).
Базисные векторы линейно независимы, поэтому матрица перехода Р не-
вырождена. И вообще, всякая невырожденная (n×n)-матрица есть матрица пе-
рахода от заданного базиса (1) к некоторому базису (1').
9. Инвариантные подпространства. Инвариантные подпространства и блочно-треугольные матрицы.
1 Инвариантные подпространства.
Пусть ![]() -- подпространство пространства
-- подпространство пространства ![]() и
и ![]() -- линейное преобразование в
-- линейное преобразование в ![]() . Вообще говоря, для произвольного
. Вообще говоря, для произвольного ![]() ,
, ![]() . Например, если
. Например, если ![]() -- евклидова плоскость,
-- евклидова плоскость, ![]() -- произвольная прямая и
-- произвольная прямая и ![]() -- поворот на угол
-- поворот на угол  , то очевидно, что для любого
, то очевидно, что для любого ![]() и принадлежащего
и принадлежащего ![]() ,
, ![]() . Однако может случиться, что некоторые подпространства переходят сами в себя при линейном преобразовании
. Однако может случиться, что некоторые подпространства переходят сами в себя при линейном преобразовании ![]() . Введем следующие определения.
. Введем следующие определения.
Определение 10.1 Пусть ![]() -- линейное преобразование пространства
-- линейное преобразование пространства ![]() . Линейное подпространство
. Линейное подпространство ![]() называется инвариантным относительно
называется инвариантным относительно ![]() , если для каждого вектора
, если для каждого вектора ![]() из
из ![]() вектор
вектор ![]() также принадлежит
также принадлежит ![]() .
.
При изучении линейного преобразования ![]() в инвариантном подпространстве
в инвариантном подпространстве ![]() можно, таким образом, рассматривать это преобразование только в
можно, таким образом, рассматривать это преобразование только в ![]() .
.
Тривиальными инвариантными подпространствами являются подпространство, состоящее лишь из нуля, и все пространство.
Большая часть матриц, встречающихся в теории линейных пространств над полем ![]()
![]() , имеет своими элементами элементы самого этого поля. Однако бывают и исключения. Например, мы будем иногда рассматривать упорядоченный базис {e1, ..., en} пространства L, как матрицу размера
, имеет своими элементами элементы самого этого поля. Однако бывают и исключения. Например, мы будем иногда рассматривать упорядоченный базис {e1, ..., en} пространства L, как матрицу размера ![]()
![]() с элементами из этого пространства. Другой пример - блочные матрицы, элементами которых в свою очередь являются матрицы - блоки исходной. Именно разбиение номеров строк
с элементами из этого пространства. Другой пример - блочные матрицы, элементами которых в свою очередь являются матрицы - блоки исходной. Именно разбиение номеров строк ![]()
![]()

 и номеров столбцов
и номеров столбцов ![]()
![]()

![]() на идущие подряд попарно непересекающиеся отрезки определяет разбиение матрицы A на блоки
на идущие подряд попарно непересекающиеся отрезки определяет разбиение матрицы A на блоки

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
