
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
С другой стороны ТН на СД (рис. 18) определяет любые условия нагружения колеса. Границы области равновесия на СД (рис. 19) определяют трение-сцепление между колесом и поверхностью при любом режиме движения колеса. Полуполосы на СД (рис. 21) определяют НУН, при которых колесо может находиться в ОРД, то есть устанавливает зависимость условий нагружения от особенностей трения.
И, наконец, формулы (23/), полученные из уравнений движения колеса (11), позволяют, зная условия нагружения и режим движения колеса, построить ВДУ на СД, использование которого на КД решает обратную задачу динамики с учётом трения для колеса, движущегося по негладкой поверхности.
Совместное использование КД и СД упрощает применение разработанных методов и делает их более наглядными. Динамическая диаграмма (ДД) представляет собой суперпозицию КД и СД. Все построения на ДД производятся в предположениях (18/), (20/) и (24/), то есть ![]() ,
, ![]() и
и ![]() .
.
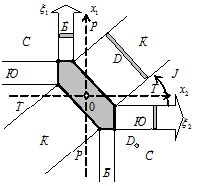
Рис. 22. Динамическая диаграмма
На ДД (рис. 22) введены две системы координат. Центральное положение занимает система ![]() СД (рис. 21) с полуполосами ОРД. КД (рис. 14) налагается на СД таким образом. КД расчленяется по линиям особых режимов на шесть частей. Эти части встроены в СД между полу полосами ОРД в области, которые соответствуют СРД. Каждая из осей
СД (рис. 21) с полуполосами ОРД. КД (рис. 14) налагается на СД таким образом. КД расчленяется по линиям особых режимов на шесть частей. Эти части встроены в СД между полу полосами ОРД в области, которые соответствуют СРД. Каждая из осей ![]() и
и ![]() КД направлена по обеим границам областей
КД направлена по обеим границам областей ![]() и
и ![]() .
.
Если посмотреть на ДД (рис. 22) с расстояния, на котором область равновесия покажется точкой, а полуполосы – линиями, то наблюдаемая картина будет полностью совпадать с КД (рис. 14). Отмеченная аналогия и дает возможность объединения СД и КД в одно целое – ДД.
Во введенной (рис. 22) системе координат ![]() область равновесия (шестиугольник) будет иметь нулевую размерность. Любая точка этой области имеет координаты:
область равновесия (шестиугольник) будет иметь нулевую размерность. Любая точка этой области имеет координаты: ![]() ,
, ![]() .
.
Области нагружение ОРД – полуполосы ![]() ,
, ![]() и
и ![]() будут одномерны. Для всех точек полуполосы
будут одномерны. Для всех точек полуполосы ![]()
![]() , а полуполосы
, а полуполосы ![]()
![]() . Для всех точек полу полос
. Для всех точек полу полос ![]()
![]() . В системе координат
. В системе координат ![]() точки, лежащие в области полу полос на прямых линиях (рис. 22), параллельных сторонам шестиугольника, имеют одинаковые координаты.
точки, лежащие в области полу полос на прямых линиях (рис. 22), параллельных сторонам шестиугольника, имеют одинаковые координаты.
При построении траектории ТД на ДД, учитывая свойства системы координат ![]() , ТД
, ТД ![]() будем изображать как точку, когда она находится в областях, соответствующих СРД.
будем изображать как точку, когда она находится в областях, соответствующих СРД.
Когда ТД ![]() попадает в полуполосу какого-либо ОРД, она превращается в отрезок (рис. 22), параллельный соответствующим сторонам шестиугольника равновесия.
попадает в полуполосу какого-либо ОРД, она превращается в отрезок (рис. 22), параллельный соответствующим сторонам шестиугольника равновесия.
Когда ТД ![]() попадает в шестиугольник равновесия, то она занимает всю его область и сама превращается в шестиугольник.
попадает в шестиугольник равновесия, то она занимает всю его область и сама превращается в шестиугольник.
С помощью ДД можно, не решая задачу численно, определить: во-первых, характер движения колеса при различных начальных условиях движения и различных вариантах нагружение, во-вторых, последовательность сменяемых режимов движения при перенагружении колеса, в-третьих, определить границы для параметров нагружение, при которых происходит смена режимов движения в нужной последовательности, и так далее.
Нагружение колеса, движущегося в особых режимах
Пусть при нагружении покоящегося колеса оно движется в одном из ОРД, то есть проекции ВДН нагружение удовлетворяют условиям (табл. 3). Определим, при каких условиях перенагружения колеса характер его движения будет ускоренным, замедленным и равномерным; как будет двигаться колесо, если эти условия не будут выполняться.
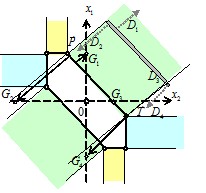
Рис. 23. Нагружение колеса, движущегося в режиме качения
Для примера рассмотрим случай качения колеса вправо без проскальзывания. В этом случае ТД ![]() изображается в виде отрезка, параллельного стороне
изображается в виде отрезка, параллельного стороне ![]() . Этот отрезок располагается на правой полу полосе
. Этот отрезок располагается на правой полу полосе ![]() (рис 23).
(рис 23).
Если при перенагружении колеса новая ТН ![]() находится в той же области, что и ТД, то есть в полуполосе
находится в той же области, что и ТД, то есть в полуполосе ![]() качения вправо, то ВДУ
качения вправо, то ВДУ ![]() , соединяющий сторону
, соединяющий сторону ![]() области равновесия с ТН, направлен от области равновесия. Следовательно, ТД
области равновесия с ТН, направлен от области равновесия. Следовательно, ТД ![]() (отрезок) удаляется от области равновесия (рис. 23). Качение колеса будет ускоренным.
(отрезок) удаляется от области равновесия (рис. 23). Качение колеса будет ускоренным.
Если новая ТН ![]() находится в продолжении полуполосы
находится в продолжении полуполосы ![]() , пересекающей область равновесия, то ВДУ
, пересекающей область равновесия, то ВДУ ![]() будет направлен к области равновесия. Следовательно, ТД
будет направлен к области равновесия. Следовательно, ТД ![]() приближается (рис. 23) к области равновесия. Качение колеса будет замедленным.
приближается (рис. 23) к области равновесия. Качение колеса будет замедленным.
Когда ТН ![]() находится на границе полуполосы
находится на границе полуполосы ![]() , то ВДУ
, то ВДУ ![]() равен нулю. В этом случае ТД
равен нулю. В этом случае ТД ![]() по ДД не перемещается (рис. 23). Качение колеса будет равномерным.
по ДД не перемещается (рис. 23). Качение колеса будет равномерным.
Если НУН качения вправо без проскальзывания (24) не выполняются, например, когда ТН ![]() находится ниже полосы
находится ниже полосы ![]() , то есть
, то есть ![]() , то ТД
, то ТД ![]() выходит из области полу полосы
выходит из области полу полосы ![]() в область
в область ![]() одного из СРД (рис. 23), превращаясь из отрезка в точку. При таких условиях нагружение колесо катится, проскальзывая по ходу движения.
одного из СРД (рис. 23), превращаясь из отрезка в точку. При таких условиях нагружение колесо катится, проскальзывая по ходу движения.
Аналогичные рассуждения, которые можно провести для каждого из ОРД колеса, приводят к следующим выводам.
Если при перенагружении колеса новая ТН находится в той же области, что и ТД, то движение колеса в этом режиме будет ускоренным. Если – в продолжении полуполосы, пересекающей область равновесия, то движение колеса в этом режиме будет замедленным. Если – на стороне области равновесия, соответствующей ОРД колеса, то движение колеса в этом режиме будет равномерным. Условия ускоренного, замедленного и равномерного характера ОРД колеса, налагаемые на проекции ВДН ![]() , имеют вид (табл. 5).
, имеют вид (табл. 5).
Таблица 5
НУН для ОРД различного характера
Характер движения | Ускорен. | Замедлен. | Равномер. | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если при перенагружении колеса НУН для ОРД (24) нарушаются, то режим движения колеса изменяется. Далее колесо движется в одном из смешанных режимов, соседних с этим ОРД на ДД.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
