
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() :
: ![]() ,
, ![]() ;
;
![]() :
: ![]() ,
, ![]() ; (29)
; (29)
![]() :
: ![]() ,
, ![]() .
.
Окончательное решение можно получить, если в (29) подставить (27).
Пример 2. Скольжение свободного колеса
Пусть движение колеса происходит под действием только вертикальной силы ![]() (рис. 7. а), приложенной к её оси. При таком нагружении колесо будем называть свободным. Здесь ТН
(рис. 7. а), приложенной к её оси. При таком нагружении колесо будем называть свободным. Здесь ТН ![]() на ДД совпадает (рис. 22) с началом
на ДД совпадает (рис. 22) с началом ![]() .
.
При таком нагружении в уравнениях (29) следует положить: ![]() =
=![]() =0.
=0.
Определим характер движения свободного колеса, движущегося вправо в режиме скольжения, при различных начальных условиях его движения.
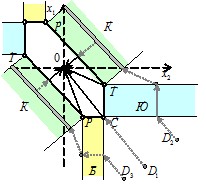
Рис. 26. Скольжение свободного колеса
При свободном нагружении колеса из всех ОРД возможен лишь режим качения без проскальзывания в обе стороны, так как через начало координат проходят полосы только этих режимов. В этом нетрудно убедиться, подставив в (24) НУН для ОРД условия свободного нагружения колеса.
Свободно нагруженное колесо может при выполнении условия (27) двигаться замедленно только в режиме скольжения. В остальных СРД характер движения колеса является переходным. В этом нетрудно убедиться, подставив в НУН для замедленного СРД (табл. 7) условия свободного нагружения колеса.
На рисунке 26 построены ВДУ колеса при свободном нагружении для случаев его скольжения вправо ![]() , торможения вправо
, торможения вправо ![]() и разгона влево
и разгона влево ![]() . Для этого вершины
. Для этого вершины ![]() ,
, ![]() и
и ![]() области равновесия соединены с ТН. Кроме того, построены ВДУ колеса для случаев его качения вправо и влево. Для этого стороны
области равновесия соединены с ТН. Кроме того, построены ВДУ колеса для случаев его качения вправо и влево. Для этого стороны ![]() и
и ![]() соединены с ТН векторами, параллельными полосе
соединены с ТН векторами, параллельными полосе ![]() .
.
Проекции этих векторов определяются (табл. 9) из решения (29), (26):
Таблица 9
Ускорение колеса в примере 2
РД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|

В зависимости от начальных условий скольжения колеса вправо возможны три варианта его дальнейшего движения.
1-й вариант – замедленное скольжение до остановки.
ТД ![]() , перемещаясь по прямой линии, проходящей по вектору
, перемещаясь по прямой линии, проходящей по вектору ![]() , попадает в область равновесия (рис. 26). Колесо, находясь в режиме скольжения вправо, движется замедленно до остановки. Это возможно, если начальные условия удовлетворяют условию (28), а именно:
, попадает в область равновесия (рис. 26). Колесо, находясь в режиме скольжения вправо, движется замедленно до остановки. Это возможно, если начальные условия удовлетворяют условию (28), а именно:
 или
или  .
.
2-й вариант – переход в режим торможения вправо и замедленного качения вправо до остановки.
ТД ![]() , перемещаясь по прямой линии, параллельной вектору
, перемещаясь по прямой линии, параллельной вектору ![]() , касается снизу полуполосы
, касается снизу полуполосы ![]() ОРД колеса юзом вправо (рис. 26). В этот момент колесо, находясь в режиме скольжения вправо, перестаёт вращаться против часовой стрелки.
ОРД колеса юзом вправо (рис. 26). В этот момент колесо, находясь в режиме скольжения вправо, перестаёт вращаться против часовой стрелки.
Так как движение свободного колеса в режиме юзом вправо невозможно (24), то ТД оказывается в тот же момент по другую сторону полуполосы ![]() , попадая в область режима торможения вправо. Здесь она перемещается до полуполосы
, попадая в область режима торможения вправо. Здесь она перемещается до полуполосы ![]() по прямой линии, параллельной вектору
по прямой линии, параллельной вектору ![]() . Это соответствует тому, что угловая скорость колеса по часовой стрелке возрастает от нуля до значения, соответствующего качению колеса без проскальзывания. При этом скорость движения оси колеса вправо одновременно уменьшается.
. Это соответствует тому, что угловая скорость колеса по часовой стрелке возрастает от нуля до значения, соответствующего качению колеса без проскальзывания. При этом скорость движения оси колеса вправо одновременно уменьшается.
Попадая в полуполосу ![]() , ТД превращается в отрезок, который, перемещаясь по полуполосе
, ТД превращается в отрезок, который, перемещаясь по полуполосе ![]() , оказывается в области равновесия. Это соответствует замедленному качению колеса вправо до остановки.
, оказывается в области равновесия. Это соответствует замедленному качению колеса вправо до остановки.
Такой случай движения колеса происходит, если:  .
.
3-й вариант – переход в режим разгона влево и замедленного качения влево до остановки.
ТД ![]() , перемещаясь по прямой линии, параллельной вектору
, перемещаясь по прямой линии, параллельной вектору ![]() , касается справа полуполосы
, касается справа полуполосы ![]() движения колеса в особом режиме буксования против часовой стрелки (рис. 26). В этот момент колесо, находясь в режиме скольжения вправо, останавливается.
движения колеса в особом режиме буксования против часовой стрелки (рис. 26). В этот момент колесо, находясь в режиме скольжения вправо, останавливается.
Так как движение свободного колеса в режиме буксования против часовой стрелки невозможно (24), то ТД оказывается в тот же момент по другую сторону полуполосы ![]() , попадая в область режима разгона влево. Здесь она перемещается до полуполосы
, попадая в область режима разгона влево. Здесь она перемещается до полуполосы ![]() по прямой линии, параллельной вектору
по прямой линии, параллельной вектору ![]() . Это соответствует тому, что скорость оси колеса влево возрастает от нуля до значения, соответствующего качению колеса без проскальзывания. При этом угловая скорость колеса против часовой стрелки одновременно уменьшается.
. Это соответствует тому, что скорость оси колеса влево возрастает от нуля до значения, соответствующего качению колеса без проскальзывания. При этом угловая скорость колеса против часовой стрелки одновременно уменьшается.
Попадая в полуполосу ![]() , ТД превращается в отрезок, который, перемещаясь по полуполосе
, ТД превращается в отрезок, который, перемещаясь по полуполосе ![]() , оказывается в области равновесия. Это соответствует замедленному качению колеса влево до остановки.
, оказывается в области равновесия. Это соответствует замедленному качению колеса влево до остановки.
Такой случай движения колеса происходит, если: .
.
Классификация условий нагружения колеса
При перенагружении колеса может происходить многократное изменение режимов его движения. Положение ТН колеса на ДД определяет режим движения колеса, в котором оно должно оказаться в конечном результате. Если ТН не лежит на границах, разделяющих ДД на области различных режимов движения, то положение ТН однозначно указывает конечный режим движения колеса. В противном случае конечный режим движения колеса зависит не только от условия нагружения, но и от начальных условий движения колеса. Приведем полную классификацию условий нагружения колеса.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
