
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Момент силы реакции негладкой опоры относительно центра колеса, точки ![]() , будем называть центральным моментом сцепления
, будем называть центральным моментом сцепления ![]() .
.
Три параметра, характеризующие ![]() реакцию негладкой опоры при относительном покое колеса на ней, связаны между собой уравнением теоремы Пуансо о параллельном переносе линии действия силы:
реакцию негладкой опоры при относительном покое колеса на ней, связаны между собой уравнением теоремы Пуансо о параллельном переносе линии действия силы:
![]() =
=![]() –
–![]()
![]() . (6)
. (6)
При относительном покое тел, находящихся в контакте, сила реакции негладкой опоры, как и сила трения покоя (1), препятствует их относительному перемещению и равна силе смещения этих тел (рис. 5, б):
![]() .
.
Все параметры реакции негладкой опоры из уравнений статики определяются через параметры силы смещения:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Величина параметров реакции, как и величина силы трения покоя (1) в задачах теоретической механики, ограничена максимальными значениями (2):
![]()
![]() ,
, ![]()
![]() ,
, ![]()
![]() . (7)
. (7)
Эти максимальные значения будем называть: ![]() – центральным моментом трения,
– центральным моментом трения, ![]() – контактным моментом трения и
– контактным моментом трения и ![]() – силой трения.
– силой трения.
При относительном движении тел, находящихся в контакте, по крайней мере один из параметров силы реакции негладкой опоры достигает своего максимального значения (7). Значения остальных двух параметров, как следует из уравнения (6) и ограничений (7), могут изменяться в пределах:
![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]()
![]() . (8)
. (8)
Минимальные значения параметров будем называть: ![]() – центральным минимоментом,
– центральным минимоментом, ![]() – контактным минимоментом и
– контактным минимоментом и ![]() – минисилой трения.
– минисилой трения.
Величина минимальных значений определяется из уравнения (6):
![]() =
=![]() ,
, ![]() =
=![]() ,
, ![]()
![]() =
=![]() . (9)
. (9)
Рассматривая в теоретической механике обратные задачи динамики с учётом трения, можно выделить некоторые проблемы их решения.
1 Зависимость движения трущегося тела от условий его нагружения.
Обычно в обратных задачах динамики задаются силы, приложенные к объекту исследования, и требуется найти, как он будет двигаться под их действием. При учете сил трения такой порядок невозможен, так как, чтобы ответить на вопрос, какие именно силы трения приложены к объекту, надо знать, как он движется, потому что от этого зависят силы трения-сцепления.
Решить эту проблему можно, если научиться определять силы трения-сцепления в любом режиме движения, а также определять сам режим движения объекта при любом его нагружении и любых начальных условиях движения.
2 Зависимость трения от режима движения и условий нагружения.
При различных режимах относительного движения максимальные значения (7) достигают различные параметры силы реакции негладкой опоры. Одновременно все три параметра (6) принять максимальные значения не могут.
Если максимальные значения принимают два из параметров, то третий принимает минимальное значение (9). В этом случае значения всех параметров определяются законами трения.
Если максимальное значение принимает лишь один из параметров, то значения двух остальных параметров ограничены (8), определяются из уравнений относительного движения объекта и зависят от условий его нагружения.
Чтобы не запутаться в проблеме определения реактивных сил, требуется сформулировать законы трения для всех возможных режимов относительного движения объекта и определить ограничения условий нагружения объекта, при которых величина сил сцепления при соответствующих режимах движения не выходит из области допустимых значений (8).
3 Определение режимов относительного движения трущихся тел.
Среди различных режимов относительного движения тел, находящихся в контакте, в классических монографиях по теоретической механике [3-5] рассматривается лишь два вида относительного движения. Это скольжение тела, размерами которого по II закону Амонтона можно пренебречь, и качение колеса без проскальзывания по прямолинейной негладкой поверхности.
При таком подходе основным отличием этих двух видов относительного движения является величина скорости точки движущегося тела, совпадающей с точкой контакта. Если эта скорость равна нулю, то и движение и трение называются словом «качение», в противном случае – «скольжением».
Если исследовать плоскопараллельное движение колеса в общем случае, допуская проскальзывание при качении, то величина скорости точки колеса, совпадающей с точкой контакта, не может быть критерием классификации этих видов движения и, следовательно, трения.
В этом случае критерием классификации удобней выбирать (как будет показано далее) характер перемещения самой точки контакта. Такой выбор позволить дать строгие определения всем возможным режимам относительного движения тел, находящихся в контакте, при которых силы трения и сцепления между ними принимают различные значения.
Задача о движении колеса по прямолинейной поверхности
Рассмотрим в качестве примера задачу о плоскопараллельном движении колеса по границе прямолинейной негладкой поверхности.
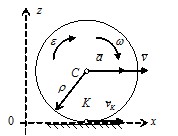
Рис. 6. Движение колеса по прямолинейной поверхности
Постановка задачи
Введем (рис. 6) прямоугольную декартову систему координат ![]() , связанную с неподвижной прямолинейной поверхностью, направив ось
, связанную с неподвижной прямолинейной поверхностью, направив ось ![]() по этой поверхности вправо, а ось
по этой поверхности вправо, а ось ![]() по нормали к ней вверх. Ось
по нормали к ней вверх. Ось ![]() , направленную перпендикулярно плоскости колеса от нас, на рисунке не изображаем.
, направленную перпендикулярно плоскости колеса от нас, на рисунке не изображаем.
Обозначим ![]() – массу колеса и части груза, перевозимого на нём;
– массу колеса и части груза, перевозимого на нём; ![]() – радиус колеса;
– радиус колеса; ![]() – момент инерции колеса относительно оси
– момент инерции колеса относительно оси ![]() , проходящей через его центр, совпадающий с центром масс, точкой
, проходящей через его центр, совпадающий с центром масс, точкой ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
