
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Точка ![]() колеса совпадает с точкой его контакта с поверхностью
колеса совпадает с точкой его контакта с поверхностью ![]() .
.
При движении на колесо налагается геометрическая связь его постоянного контакта с негладкой поверхностью: ![]() .
.
При решении задачи воспользуемся двумя из общих теорем динамики.
Теорема о движении центра масс колеса. Произведение массы колеса и части груза, перевозимого на нём, на ускорение центра масс колеса равно сумме всех приложенных к нему сил:
 .
.
Теорема об изменении главного центрального кинетического момента колеса. Первая производная от главного центрального кинетического момента колеса равна сумме моментов относительно центра масс колеса ![]() всех, приложенных к нему сил:
всех, приложенных к нему сил:
 .
.
Кинематические характеристики колеса,
движущегося плоскопараллельно
Обозначим ![]() и
и ![]() – проекции скоростей центра
– проекции скоростей центра ![]() колеса и точки
колеса и точки ![]() на ось
на ось ![]() ,
, ![]() – проекция угловой скорости колеса на ось
– проекция угловой скорости колеса на ось ![]() .
.
Из теоремы о скоростях точек плоской фигуры следует, что:
![]() . (10)
. (10)
Обозначим ![]() – проекция вектора углового ускорения колеса на ось
– проекция вектора углового ускорения колеса на ось ![]() ,
, ![]() – проекция вектора ускорения оси колеса
– проекция вектора ускорения оси колеса ![]() на ось
на ось ![]() (рис. 6).
(рис. 6).
Система сил, действующих на движущееся колесо.
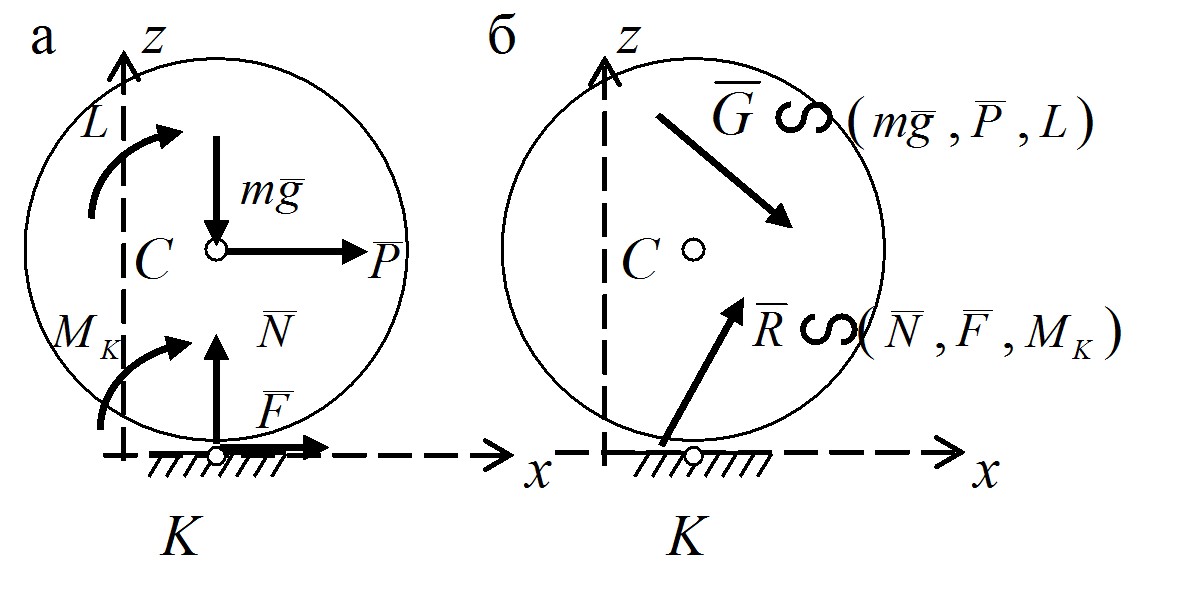
Рис. 7. Сила нагружения ![]() и сила реакции
и сила реакции ![]()
Пусть к оси колеса приложены активные силы: ![]() – сила тяжести самого колеса и той части перевозимого груза, которая приходится на это колесо;
– сила тяжести самого колеса и той части перевозимого груза, которая приходится на это колесо; ![]() – сила тяги или сила торможения, если это колесо «ведомое»;
– сила тяги или сила торможения, если это колесо «ведомое»; ![]() – крутящий или тормозящий момент со стороны соответствующих устройств (рис. 7, а).
– крутящий или тормозящий момент со стороны соответствующих устройств (рис. 7, а).
Плоскую систему сил: ![]() ,
, ![]() и
и ![]() – заменим (рис. 7, б) равнодействующей
– заменим (рис. 7, б) равнодействующей ![]() , называемой силой нагружения, у которой:
, называемой силой нагружения, у которой: ![]() ,
, ![]() ,
, ![]() .
.
Равнодействующую сил реакции опоры (рис. 7, б) будем называть силой реакции. Её составляющими являются (рис. 7, а): нормальная реакция ![]() ; горизонтальная составляющая
; горизонтальная составляющая ![]() , которая в зависимости от режима движения колеса может быть либо силой трения, либо силой сцепления; контактный момент
, которая в зависимости от режима движения колеса может быть либо силой трения, либо силой сцепления; контактный момент ![]() , называемый контактным моментом трения или сцепления, также в зависимости от режима движения колеса.
, называемый контактным моментом трения или сцепления, также в зависимости от режима движения колеса.
Уравнения движения колеса
Учитывая, что при плоскопараллельном движении колеса его центральный кинетический момент относительно оси ![]() , проходящей через его центр, равен произведению центрального момента инерции на угловую скорость, а производная угловой скорости по времени равна угловому ускорению колеса:
, проходящей через его центр, равен произведению центрального момента инерции на угловую скорость, а производная угловой скорости по времени равна угловому ускорению колеса:
![]() ,
, ![]() ,
,
спроецируем уравнение теоремы о движении центра масс колеса на оси ![]() и
и ![]() , а уравнение теоремы об изменении главного кинетического момента колеса – на ось
, а уравнение теоремы об изменении главного кинетического момента колеса – на ось ![]() (рис. 6). Получим уравнения движения колеса:
(рис. 6). Получим уравнения движения колеса:
![]() ,
, ![]() ;
;
![]() . (11)
. (11)
Чтобы воспользоваться полученными уравнениями, надо знать не только, как нагружено колесо, но и чему равны значения параметров сил трения-сцепления при этом нагружении.
Чтобы определить значения параметров сил трения-сцепления, надо знать не только, как оно нагружено, но и как оно движется.
Поэтому прежде определим все возможные режимы плоскопараллельного движения колеса по прямолинейной поверхности.
Классификация движения колеса
Классифицируем плоскопараллельное относительное движение колеса по прямолинейной поверхности.
Движение колеса по прямолинейной поверхности можно классифицировать, изображая (рис. 8, 10) векторы трех скоростных параметров: ![]() ,
, ![]() и
и ![]() .
.
Особые режимы плоскопараллельного движения колеса
Особыми режимами движения (ОРД) колеса будем называть такое движение колеса, при котором на него накладывается дополнительное кинематическое условие (связь), полагающее нулю одну из кинематических характеристик (10). При движении в особых режимах колесо имеет одну степень свободы. Достаточно задавать значение лишь одного кинематического параметра – значение последнего будет определяться уравнением (10).
ОРД колеса являются (рис. 8) буксование, качение и юз. Стрелочка над буквой указывает направление движения колеса в этом режиме.
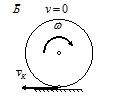
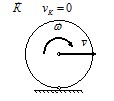
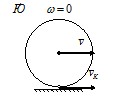
Рис. 8. Особые режимы движения колеса
При буксовании ![]() и
и ![]() . Колесо вращается, не перемещаясь вдоль поверхности, то есть совершает вращательное движение.
. Колесо вращается, не перемещаясь вдоль поверхности, то есть совершает вращательное движение.
При качении (без проскальзывания) ![]() и
и ![]() . Колесо, вращаясь, перемещается вдоль поверхности так, что ось вращения всё время проходит через точку
. Колесо, вращаясь, перемещается вдоль поверхности так, что ось вращения всё время проходит через точку ![]() колеса.
колеса.
При юзе ![]() и
и ![]() . Колесо перемещается вдоль поверхности, не вращаясь, то есть совершает поступательное движение.
. Колесо перемещается вдоль поверхности, не вращаясь, то есть совершает поступательное движение.
Каждый из ОРД можно рассматривать (рис. 9) как сочетание двух остальных режимов, одинаковые кинематические параметры которых равны и противоположно направлены.

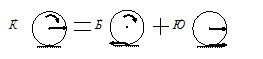

Рис. 9. Связь между ОРД
Например (рис. 9), буксование по часовой стрелке – это сочетание юза влево с одновременным качением вправо, такое, что скорость оси колеса влево от движения юзом точно компенсируется скоростью от качения вправо. Качение вправо – это сочетание буксования по часовой стрелке с одновременным движением юзом вправо. Юз вправо – это сочетание качения вправо с одновременным буксованием против часовой стрелки и так далее.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
