

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() ,
,
где
![]() .
.
Такой полином имеет k нулевых корней. Число k назвается порядком астатизма. Для астатической системы можно записать
![]() ,
,
где
![]() .
.
Характерным признаком астатизма служит наличие в структурной схеме k интегрирующих звеньев:
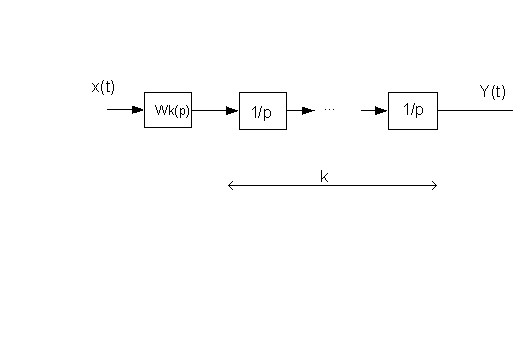
Порядок астатизма системы по управляющему воздействию равен числу интегрииующих звеньев, входящих в контур. Порядок астатизма замкнутой системы по отношению к рассматриваемому воздействию равен числу интегрирующих звеньев, включенных в цепь обратной связи между точками приложения этого воздействия (входом) и измерения ошибки (выходом) и не зависит от числа интегрирующих звеньев, включенных в цепь прямого преобразования сигнала между этими точками. Так как для астатической системы значение W(0) не определено, то можно ввести в рассмотрение показатель
![]() ,
,
называемый добротностью системы по соответствующей производной выходной переменной (по скорости, ускорению и т. д.). Отметим, что астатизм системы управления может быть обусловлен свойствами объекта управления или наличием в составе системы ПИ и ПИД – регуляторов. Реализация замкнутых систем с высоким порядком астатизма достаточно затруднительна, поскольку система автоматического регулирования, содержащая всего два интегрирующих звена, является структурно неустойчивой и не может быть реализована без специальных корректирующих устройств. Важно знать, что чем выше порядок астатизма системы, тем выше точность в установившемся режиме и меньше запас устойчивости. Введение пропорциональной составляющей в закон управления по отклонению влияет и на точность и на устойчивость.
В завершение раздела отметим следующие простые, но важные положения.
1. При любых последовательных и параллельных соединениях устойчивых систем всегда будет получаться устойчивая система.
2. Если среди соединяемых последовательно или параллельно систем имеется хотя бы одна неустойчивая, то и вся система, полученная в результате соединения, будет неустойчивой.
3. Исследование устойчивости любой линейной системы, полученной путем последовательного и параллельного соединения любого количества элементарных систем, может сводиться к исследованию устойчивости отдельных элементарных систем, входящих в ее состав.
4. Зная полюсы передаточных функций элементарных звеньев, легко определить какие полюсы в правой полуплоскости будет иметь передаточная функция системы, полученная путем последовательных и параллельных соединений этих звеньев, в случае, если она неустойчива.
Основы оптимизации и методы синтеза систем управления Постановка задачи параметрической оптимизацииПусть поведение одномерной системы управления описывается дифференциальным уравнением вида:
B(p) y(t) = A(p) g(t), p = d / dt | (3.1) |
![]() .
.
B(p) – операторная функция преобразования. Аналогично можно записать операторную функцию A(p). Особого внимания заслуживает рассмотрение преобразования входного сигнала g(t) в выходной y(t):
| (3.2) |
![]() – ядро операторного преобразования. Если в системе управления выделить вектор варьируемых параметров х, то последняя формула примет вид:
– ядро операторного преобразования. Если в системе управления выделить вектор варьируемых параметров х, то последняя формула примет вид:
| (3.3) |
Пусть на качество САУ наложены ограничения вида:
| (3.4) |
| (3.5) |
| h | (3.6) |
 ≤
≤  ≤
≤ Здесь приняты следующие обозначения: ![]() - абсолютное значение величины перерегулирования;
- абсолютное значение величины перерегулирования; ![]() - статическая ошибка; h(x, t) - переходная характеристика; h (х, t
- статическая ошибка; h(x, t) - переходная характеристика; h (х, t![]() ∞) - установившееся значение переходного процесса;
∞) - установившееся значение переходного процесса; ![]() - требуемое значение выходной (управляемой) переменной.
- требуемое значение выходной (управляемой) переменной.
Задача параметрической оптимизации для одномерной САУ, поведение которой описывается уравнением (3.3), состоит в определении таких значений компонент вектора x, принадлежащих заданной области, при которых САУ будет обладать требуемыми характеристиками. Решение задачи сложный и трудоемкий процесс, часто с трудно разрешимыми ситуациями. «Метод проб и ошибок» в поиске рациональных параметров не является эффективным. Рассмотрим решение на основе моделирования процессов в комплексной плоскости. В качестве модели САУ будем рассматривать модель вида:
Y(x, s) = W(x, s) * G(s), | (3.7) |
Воспользуемся доказанным утверждением [6]. Для выполнения условий (3.4) - (3.6), налагаемых на качество управления во временной области, достаточно выполнение следующих условий в комплексной плоскости:
| s Y(x, s) - | (3.8) |
s ∈ Ω, (Ω = σ + jω: σ ≤ -η, η > 0, | ω | ≤ μ |σ| ). | (3.9) |
В связи с этим задача параметрической оптимизации может быть переформулирована следующим образом. Для САУ, поведение которой описывается уравнением (3.7), требуется найти такие значения компонент вектора оптимизируемых параметров х = хопт., при которых система управления будет обладать требуемым качеством (3.8) – (3.9) за счет максимального приближения к эталоной системе управления, чтобы целевая функция F(x), характеризующая такое приближение, принимала минимальное значение ![]() .
.
Прежде чем перейти к решению задачи, рассмотрим влияние полюсов и нулей на статические и динамические характеристики системы управления.
Запишем выражение установившегося процесса на выходе одномерного объекта управления:
![]() .
.
Отметим, что если нуль и полюс находятся близко друг к другу, а именно: на расстоянии менее чем 0.1 модуля, то влияние такого полюса ослабляется нулем, то есть полюс не оказывает существенного влияния на динамические характеристики системы управления. Рассмотрим пример. Пусть выходная функция Y(s) имеет вид:
![]() , ( s1п = - 5.2, s2п = - 8, s1н = -5).
, ( s1п = - 5.2, s2п = - 8, s1н = -5).
Поскольку расстояние между нулем и первым полюсом намного меньше модуля корня, то влиянием ближайшего к нулю полюса можно пренебречь, так как он оказывает несущественное влияние на динамику системы управления в целом. Рассмотрим ситуацию, когда многомерная система управления, описываемая системой уравнений (3.8), не удовлетворяет требованиям качества, это означает, что некоторые полюсы выходят за границу области Ω или нули оказывают отрицательное влияние на качество управления. Идеальной системой управления будем считать такую систему, которая имеет заданное расположение полюсов и нулей или заданный корневой годограф. Для решения задачи параметрической оптимизации введем в рассмотрение расположение идеальных полюсов и нулей. Известные формулы перехода от корней алгебраического уравнения к его коэффициентам позволяют найти передаточную функцию эталоной системы управления вида:
| (3.10) |
Передаточная функция оптимизируемой по параметрам системы управления может быть представлена в виде:
| (3.11) |
Таким образом, имеем эталоную передаточную функцию в виде (3.10) и реальную в виде (3.11). Метод параметрической оптимизации основан на приближении реальной системы управления к эталоной как можно ближе за счет оптимальной настройки параметров x. Введем в рассмотрение оптимизируемую функцию как средне - квадратичную ошибку аппроксимации по коэффициентам передаточных функций эталоной и оптимизируемой по параметрам систем управления. Целевая функция примет вид:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
