

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Y (g, х, p, f, s) = WI (х, p, s) g (s) + WII (х, p, s) f (s) | (4.1) |
При нахождении вектора х в момент tм решение будет искаться в интервале![]() t. Для этого необходимо задать эталоную систему управления через расположение полюсов и нулей. Синтезируемый закон управления должен отвечать за формирование в интервале
t. Для этого необходимо задать эталоную систему управления через расположение полюсов и нулей. Синтезируемый закон управления должен отвечать за формирование в интервале ![]() t математической модели максимально приближенной к эталоной. Тогда из решения расчетной системы уравнений определяются искомые зависимости
t математической модели максимально приближенной к эталоной. Тогда из решения расчетной системы уравнений определяются искомые зависимости
х = х (p, g, f). | (4.2) |
Рассмотрим формирование целевой функции. Моделирование процессов в комплексной области позволяет выбрать в качестве целевой функции функцию вида:

F (x, f, p, g) → min. | (4.3) |
Здесь через ![]() обозначено заданное значение управляемой величины Yi на
обозначено заданное значение управляемой величины Yi на
i-ом выходе объекта управления в установившемся режиме, через ![]() обозначены весовые коэффициенты, назначение которых разделять каналы управления по степени значимости. Минимизация F будет проводиться по переменным вектора х. Это позволит в дискретные моменты времени
обозначены весовые коэффициенты, назначение которых разделять каналы управления по степени значимости. Минимизация F будет проводиться по переменным вектора х. Это позволит в дискретные моменты времени
tm = tm-1 +![]() t по измеренным или оцененным значениям p, f, g находить
t по измеренным или оцененным значениям p, f, g находить
х(tm ) из расчетной системы уравнений. Предполагается, что реализации p(tm) определяются прямо (с датчиков) или косвенно (с помощью оценок), реализации g(tm), относящиеся к задающим воздействиям, поступают от ЭВМ в моменты времени tm в соответствии с целями управления. Значения вектора возмущений f(tm) учитываются в том случае, если места приложения таких воздействий известны, а их величины могут быть измерены или оценены. Отметим, что при синтезе закона управления нужно стремиться к получению линейных алгебраических зависимостей, что обеспечит наиболее простое, а значит и более эффективное управление объектом. Линейные зависимости могут быть получены путем рационального синтеза структуры регулятора
(аналитического конструирования регулятора). Полученные зависимости:
х(tm) = х (p, f, g, tm) позволят формировать вектор управляющих воздействий
V (tm) = х (tm) - х(tm-1), | (4.4) |
направленый на изменение параметров регулятора. Перенастройка параметров х осуществляется с помощью исполнительных устройств.
Перейдем к рассмотрению синтеза закона управления для второй схемы. Отметим, что, несмотря на исключение регулятора из контура управления, его формальное присутствие остается в математической модели системы управления. Работу регулятора в данном случае берет на себя ЭВМ. При этом характеристики модели регулятора будут влиять на выработку управляющих воздействий U. Обратимся к схеме и найдем выражение, определяющее вектор Y, параметр s у функций опущен для лучшей наглядности.
Y = | (4.5) |
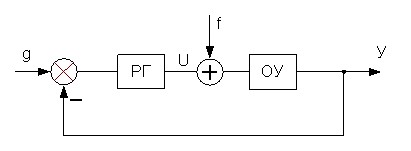
Выразим U посредством g и f. Для этого вначале положим сигнал f = 0. Тогда, как это наглядно видно из схемы, можно записать:
 .
.
Далее положим сигнал g = 0, и найдем связь U с f, будем иметь:
![]() .
.
В соответствии с принципом суперпозиции можно записать:
| (4.6) |
Несмотря на сложность выражений (4.5) - (4.6) окончательные формулы при решении задач намного проще после подстановки значений p, g, f, x в момент времени tm. Законы управления (4.4) и (4.6) позволяют на дискретных интервалах времени ![]() t с помощью ЭВМ определять управляющие воздействия, обеспечивающие заданные требования к управлению в виде выполнения условий (3.8) и (3.9). Учет требований (3.8) и (3.9) закладывается при формировании обобщенного функционала качества (4.3), минимизация которого составляет основу формирования закона управления.
t с помощью ЭВМ определять управляющие воздействия, обеспечивающие заданные требования к управлению в виде выполнения условий (3.8) и (3.9). Учет требований (3.8) и (3.9) закладывается при формировании обобщенного функционала качества (4.3), минимизация которого составляет основу формирования закона управления.
Пусть динамика нестационарного объекта управления описывается передаточной функцией вида:
![]() .
.
Требуется спроектировать схему управления объектом при нестационарности задающего воздействия g, при нестационарности параметров объекта k и a. Найти функцию управления объектом, позволяющую поддерживать качество управления на заданном уровне, обеспечивая выполнение условий:
| s Y(s) - g | s=0 ≤ ![]() ,
,
s ∈ Ω, (η = 2, μ ≤1).
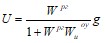
Выберем ПИ - регулятор. Введем в рассмотрение два вектора х = (kp, ki),
p = (k, a). Схема регулятора имеет вид:
![]()
![]()
![]()
Запишем характеристическое уравнение САР в параметрической форме:
![]() .
.
Зададим эталоную САР через расположение корней характеристического уравнения: ![]() , уравнение примет вид:
, уравнение примет вид:
s2 + 5 s + 6 = 0.
Составим целевую функцию:
 .
.
Последнее слагаемое характеризует статическую ошибку, учитывая, что величина статической ошибки должна подчиняться условию:
| s Y(s) – g| ≤![]() , (s = 0).
, (s = 0).
Параметры регулятора определятся из уравнений:
![]()
![]()
По сути это есть зависимость x = x(k, a). Таким образом, сигналы, подаваемые ЭВМ на регулятор будут формироваться в соответствии с законом:
V(tm) = х (a, k, tm) - х (a, k, tm-1)).
V 1(tm) =![]() ,
,
V2(tm) =![]() .
.
Схема 1 системы адаптивного управления примет вид:

Рассмотрим процедуру синтеза закона управления для схемы 2 адаптивного управления, воспользовавшись полученной ранее формулой (4.6) при f = 0.
![]()
Поскольку управляющее воздействие должно вырабатываться только по завершению переходного процесса, положим s = 0, тогда
 .
.
Задача оптимизации обычно состоит в отыскании и поддержании таких управляющих воздействий, при которых обеспечивается экстремум некоторого критерия качества функционирования объекта управления. Эта задача может решаться автоматически с помощью экстремальных регуляторов, осуществляющих в процессе работы поиск оптимальных управляющих воздействий. Системы, реализующие автоматический поиск и сопровождение экстремума некоторого показателя качества работы объекта, называются экстремальными системами управления или системами автоматической оптимизации. Системы автоматической оптимизации, благодаря реализации в них алгоритмов поиска оптимальных управлений, обладают рядом преимуществ, главным из которых является их свойство нормально функционировать в условиях неполной априорной информации об объекте и о действующих на него возмущениях. Применение экстремальных систем управления целесообразно в тех случаях, когда критерий качества работы объекта имеет ярко выраженный экстремум и имеются возможности реализации поиска и поддержания оптимального (экстремального) его режима функционирования. Развитие теории и техники экстремальных систем управления достигло в настоящее время значительного уровня. Промышленностью выпускаются типовые экстремальные регуляторы (автоматические оптимизаторы) для ряда технологических процессов.
Экстремальные системы управления составляют один из наиболее теоритически и практически развитых классов адаптивных систем. Экстремальными называются такие объекты автоматического управления, в которых статическая характеристика имеет экстремум, положение и величина которого не известны и могут изменяться непрерывным образом.
Обычно экстремальный регулятор осуществляет поиск и поддержание таких значений координат объекта ![]() , при которых выход
, при которых выход ![]() достигает экстремального значения. Такой режим работы объекта и системы в целом является оптимальным в смысле минимума или максимума критерия качества. Примером одномерного экстремального объекта может служить самолет. Зависимость километрового расхода топлива y от скорости полета x характеризуется наличием экстремума, величина и положение которого изменяются при изменении веса самолета за счет расхода топлива.
достигает экстремального значения. Такой режим работы объекта и системы в целом является оптимальным в смысле минимума или максимума критерия качества. Примером одномерного экстремального объекта может служить самолет. Зависимость километрового расхода топлива y от скорости полета x характеризуется наличием экстремума, величина и положение которого изменяются при изменении веса самолета за счет расхода топлива.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
