

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
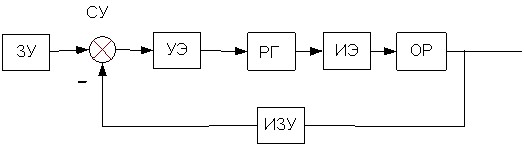
Здесь приняты следующие обозначения: ЗУ - задающее устройство, предназначенное для задания требуемого значения или закона изменения регулируемой величины; СУ - сравнивающее устройство, предназначенное для сравнения измеренного значения регулируемой величины с требуемым; УЭ - усилительный элемент, предназначенный для усиления мощности сигнала в цепи управления, он питается энергией от внешнего источника;
РГ – регулятор, это устройство, которое в зависимости от величины поступающего сигнала, в соответствии с заложенным в нем законом, вырабатывает управляющий сигнал определенной величины; ИЭ - исполнительный элемент, этот элемент воздействует на объект регулирования; ОР - объект регулирования; ИЗУ - измерительное устройство, оно измеряет или регистрирует значение измеряемого параметра. Обычно оно представляет собой преобразователь одной физической величины в другую. Измерительные устройства необходимы для преобразования управляемых переменных в сигналы управления. Система, состоящая из объекта регулирования и регулятора, называется контуром управления. Устройство, обеспечивающее процесс управления, называется управляющим.
Рассмотрим принцип управления по отклонению регулируемой величины от заданного значения. Он основан на использовании информации о результатах управления. При управлении с обратной связью значение управляемой переменной постоянно сравнивается с ее заданным (эталонным) значением. В представленной ниже схеме, состоящей из регулятора и объекта регулирования, показано приложение воздействий и следование сигналов:
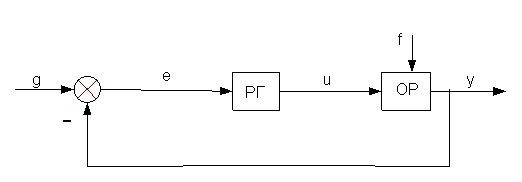
На объект регулирования воздействует внешнее возмущение f и управляющее воздействие u с регулятора. Информация о состоянии ОР передается по цепи обратной связи на вход системы, где сравнивается с заданным значением g. Разность e = g – y воздействует на регулятор. Введение обратной связи приводит к тому, что обратная связь входит в канал управления. Этот принцип управления является фундаментальным.
Рассмотрим следующий принцип управления - управление по возмущению. Он предусматривает измерение f и создание управляющих воздействий, компенсирующих влияние f на объект:
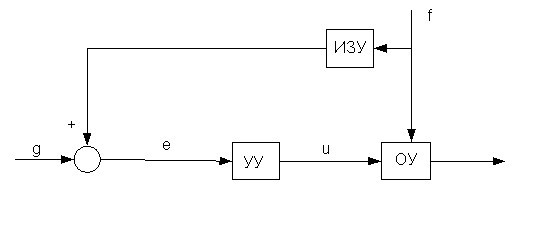
Возмущение, действующее на ОУ, измеряется и подается на вход системы, где суммируется с g. На основе этой информации управляющее устройство вырабатывает управляющее воздействие u, подаваемое на объект управления. К достоинствам такого принципа управления можно отнести высокое быстродействие, а к недостаткам то, что невозможно заранее учесть весь спектр возможных возмущений и воздействий, и как следствие, возможность потери устойчивости в процессе управления объектом. Система разомкнутого цикла отличается от системы замкнутого цикла тем, что в системе с обратной связью имеет место сравнение реального значения управляемой переменной с ее заданным (эталонным) значением, а в разомкнутой системе такое сравнение отсутствует.
Рассмотрим схему комбинированного принципа управления:
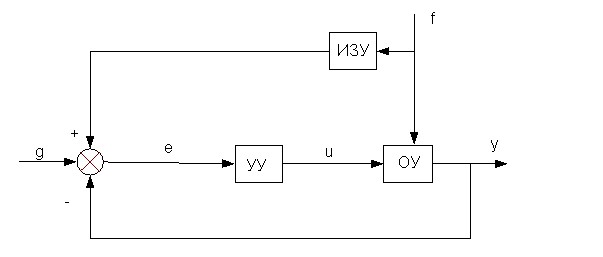
Отметим, что автоматические системы высокой точности обычно строятся по принципу комбинированного управления (по отклонению и по возмущению).
Рассмотрим принцип управления - адаптацию:
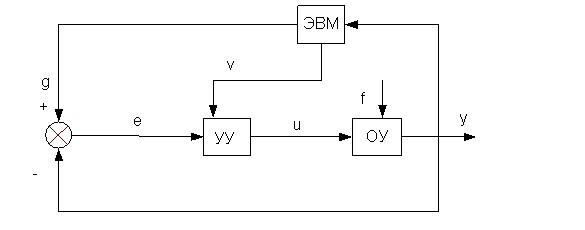
Схема состоит из обычной системы управления и контура самонастройки. Самонастраивающаяся система - это система, в которой в процессе функционирования автоматически в соответствии с формируемым ЭВМ законом управления изменяются определенные параметры управления, обеспечивая заданного качества управления в условиях непостоянности задающих и возмущающих воздействий. Адаптивные системы бывают самонастраивающиеся и самоорганизующиеся, последним из которых присуща автоматическая перестройка конфигурации структуры в процессе работы системы.
Одной из существеных характеристик системы автоматического регулирования является зависимость значения регулируемого параметра от величины внешнего воздействия. По виду такой рабочей характеристики различают статическое и астатическое регулирование. Регулирование со статической характеристикой это регулирование, при котором в установившемся режиме имеется определенная зависимость между величиной отклонения регулируемого параметра от заданного значения и величиной внешнего воздействия. В противном случае имеет место астатическое регулирование. Система управления (СУ) называется системой прямого действия, если у нее при изменении значения управляемого параметра исполнительный элемент приходит в действие непосредственно от сигналов возникающих в чувствительных элементах без использования вспомогательной энергии. В противном случае система является системой непрямого действия. Стабилизирующей системой управления называется такая система управления, назначение которой поддерживать значение регулируемого параметра постоянным (g(t) = const). Следящей системой управления называется такая система управления, которая изменяет величину управляемого параметра в зависимости от неизвестного заранее значения задающего воздействия (g(t) – случайная величина). Система управления, у которой задающее воздействие g(t) – известная функция, называется системой программного управления. Перейдем к рассмотрению математического описания процессов, происходящих в системах регулирования.
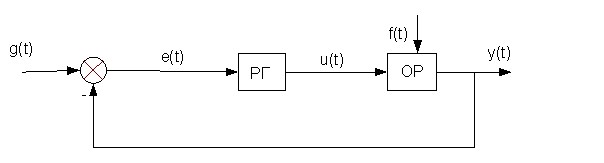
На представленной схеме показано, что между входными и выходными сигналами существует непрерывная функциональная связь во времени. В данном случае САР будет характеризоваться следующими параметрами:
y(t) - управляемый параметр; u(t) - управляющее воздействие; f(t) - возмущающее воздействие; e(t) – рассогласование сигналов; g(t) - задающее воздействие. Значения этих параметров в моменты времени t1, t2, ... tk дают полную информацию о состоянии САР. Пусть состояние ОР характеризуется функцией G(u, f,y), а регулятора - функцией Q(e, u), тогда закон функционирования системы может быть представлен в общем виде системой уравнений вида [1]:
y (t) = G [ y(1), y(2), ..., y(n), f, f(1), ..., f(l), u, u(1), ... ,u(q)] | (1.1) |
u (t) = Q [ e, e (1), ... e (n), u(1) , ..., u(q)] | (1.2) |
e (t) = g (t) - y (t) | (1.3) |
Переменные u и e - внутрение, математически их можно выразить через внешние переменные. Следовательно, можно записать:
y = F [ y(1), ...y(n) , f, f(1) , ...f(l) , g, g(1) , ...g(m) ] | (1.4) |
Здесь под y(i) , f(i) , g(1) понимаются соответствующие производные. Уравнение (1.4) называется уравнением динамики. Оно описывает переходные процессы, происходящие в системе. При проектировании сложных технических систем возникают проблемы вычислительного плана особенно, если уравнения нелинейные или высокого порядка. В таких случаях при оценке процессов, описывающих поведение динамической системы, в первом приближении пользуются упрощенной математической моделью, которая получается в ходе линеаризации нелинейного уравнения. Рассмотрим эту процедуру.
Если F - аналитическая функция, то допускается разложение ее в ряд Тейлора в окрестности точки равновесия. В нашем случае точка равновесия есть точка, характеризующая установившееся состояние. Чем меньше отклонение от состояния равновесия, тем меньше ошибка, возникающая в результате замены нелинейного уравнения линейным. Допустим, что y(t) является функцией нелинейной, а F - аналитической. Учтем, что состояние равновесия характеризуется уравнением статики. Такое уравнение можно получить из уравнения (1.4), приравняв производные по времени к нулю:
y0 = F (0, ..., 0, f0, 0, ...0, g0, 0, ...,0). |
Пусть воздействия получили приращения и приняли вид:
g = g0 + Δ g, f = f0 + Δ f. |
Тогда в системе возникает переходной процесс:
y = y0 + Δ y. |
Представим функцию F рядом Тейлора в окрестности точки равновесия. Оставим в разложении только линейные члены, учитывая их весомость по сравнению с откидываемыми малыми величинами:
y = F (0,...,0,f0,0,...,0,g0,0,...,0) + |
Далее, учтем, что y0 = F (0, ... 0, f0, 0, ...0,g0, 0, ...0) и отметим, что в уравнение динамики входят только отклонения, но не сами переменные, кроме того
|
Поэтому символ приращения Δ можно опустить. Введем коэффициенты а![]() , c
, c![]() , b
, b![]() равные частным производным функции F по g, f, y соответственно в точке равновесия. Перепишем уравнение динамики с учетом введенных переменных, получим:
равные частным производным функции F по g, f, y соответственно в точке равновесия. Перепишем уравнение динамики с учетом введенных переменных, получим:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
