

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

Здесь приняты следующие обозначения: al(x), ![]() - соответственно коэффициенты полиномов A(x, s) и
- соответственно коэффициенты полиномов A(x, s) и ![]() ; bl(x),
; bl(x), ![]() - соответственно коэффициенты полиномов B(x, s) и
- соответственно коэффициенты полиномов B(x, s) и ![]() . Функция F(x) – алгебраическая. Для нахождения ее минимума на множестве X, заданном ограничениями вида: φl(х) = 0, (l=
. Функция F(x) – алгебраическая. Для нахождения ее минимума на множестве X, заданном ограничениями вида: φl(х) = 0, (l=![]() ), воспользуемся подходом основанным на введении неопределенных множителей Лагранжа
), воспользуемся подходом основанным на введении неопределенных множителей Лагранжа ![]() [2], что предполагает решение системы уравнений вида:
[2], что предполагает решение системы уравнений вида:
| (3.12) |
 Ф(x,α) = F(x)+
Ф(x,α) = F(x)+где k - размерность вектора ![]() . Первые уравнения вытекают из приравнивания к нулю производных функции Ф(x, α) по переменным вектора α. Минимум функций F(x) и Ф(x, α) будет достигнут в точке x = xопт, найденной из решения (3.13), если в этой точке будет выполнено условие положительности квадратичной формы ( условие Вейерштрасса):
. Первые уравнения вытекают из приравнивания к нулю производных функции Ф(x, α) по переменным вектора α. Минимум функций F(x) и Ф(x, α) будет достигнут в точке x = xопт, найденной из решения (3.13), если в этой точке будет выполнено условие положительности квадратичной формы ( условие Вейерштрасса):
| (3.13) |
где ![]() xi,
xi, ![]() xj - малые приращения компонент вектора х. Следовательно, чтобы x = xопт была точкой, в которой целевая функция принимает минимальное значение, необходимо и достаточно, чтобы в этой точке выполнялись условия (3.12) и (3.13). Для решения (3.12) используются известные методы, в частности, численный метод решения системы нелинейных алгебраических уравнений Ньютона - Рафсона. Отметим, что любые неравенства, накладываемые на неизвестные параматры вектора х, можно привести к равенствам, вводя дополнительные неизвестные. Например, пусть имеем ограничение вида: х
xj - малые приращения компонент вектора х. Следовательно, чтобы x = xопт была точкой, в которой целевая функция принимает минимальное значение, необходимо и достаточно, чтобы в этой точке выполнялись условия (3.12) и (3.13). Для решения (3.12) используются известные методы, в частности, численный метод решения системы нелинейных алгебраических уравнений Ньютона - Рафсона. Отметим, что любые неравенства, накладываемые на неизвестные параматры вектора х, можно привести к равенствам, вводя дополнительные неизвестные. Например, пусть имеем ограничение вида: х![]() <5, которое можно переписать в виде: х
<5, которое можно переписать в виде: х![]() =5 - х
=5 - х![]() , где х
, где х![]() дополнительно вводимый параметр, подлежащий определению наравне с остальными параметрами вектора х.
дополнительно вводимый параметр, подлежащий определению наравне с остальными параметрами вектора х.
Рассмотрим применение методики параметрической оптимизации на конкретной задаче.
Проектирование САР с ПИД - регулятором в контуре управления.
Пусть задана схема управления в виде:
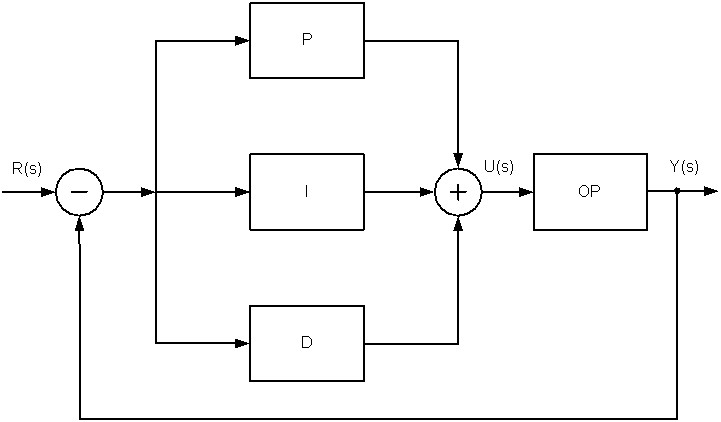
В схеме известен вид передаточных функций звеньев:
Wp = kp; W i= ki /s; Wd = kd s; Wор (s) = k / (s + a).
Нужно найти значения вектора параметров x = (kp, ki, kd), при которых корни si характеристического уравнения замкнутой системы будут принадлежать области качества Ω, определяемой параметрами η = 2, μ ![]() 1. Решение будем строить по шагам:
1. Решение будем строить по шагам:
Wраз. (x, s) = (kp + ki/s + kds) k /(s + a) = k(skp + ki + kds2)/(s(s +a)).
Определим передаточную функцию замкнутой системы:  .
.
![]() .
.
4. Зададим эталоное расположение корней характеристического уравнения
и по ним составим характеристическое уравнение:
![]() ,
, ![]() = s2 + 5s + 6 = 0.
= s2 + 5s + 6 = 0.
![]() .
.
Отметим, что поскольку на параметры вектора х не наложены ограничения, то имеем дело с задачей безусловной оптимизации. Для достижения минимума положительной квадратичной функции F(x) достаточно, чтобы нулю равнялись все три слагаемые, а именно:


Если мы используем необходимое и достаточное условие минимальности F(x), то получаем следующую систему уравнений:
Поскольку оптимизируемая функция является положительной квадратичной, она имеет один экстремум – минимум и, следовательно, нет необходимости проверять условие Вейерштрасса, то есть положительность квадратичной формы.
Рассмотрим алгоритм параметрической оптимизации для многомерной САУ. Его применение предполагает выполнение следующих этапов:
Задание схемы САУ, передаточных функций звеньев, вектора оптимизируемых параметров х, ограничений φ(x), начального значениях = х0.
Выполнение декомпозиции схемы на каналы вход - выход. Нахождение матрицы W(x, s). Анализ качества системы управления по расположению нулей и полюсов матрицы W(x, s) при х = х0. Если качество удовлетворительно, то нужно перейти к п.9. Задание эталоной системы управления в видеПри автоматизации производственных процессов возникает задача выбора типового регулятора и определение его параметров, обеспечивающих заданное качество управления объектом. При этом обычными приемами синтеза регулятора являются: выбор закона регулирования в виде уравнений динамики регулятора; определение передаточной функции САР; исследование САР на устойчивость; определение параметров настройки регулятора в соответствии с требованиями, налагаемыми на качество управления. Если не удается настроить параметры регулятора должным образом, то проектирование продолжается в направлении усложнения регулятора. Под сложностью регулятора понимают порядок его уравнений. Обычно сложность регулятора не превышает сложности объекта регулирования.
4.1.Постановка задачи синтеза самонастраивающихся систем
Рассмотрим две схемы адаптивного управления:
- схема 1 - “ЭВМ + РГ + ОУ”:

- схема 2 - “ЭВМ + ОУ ” :
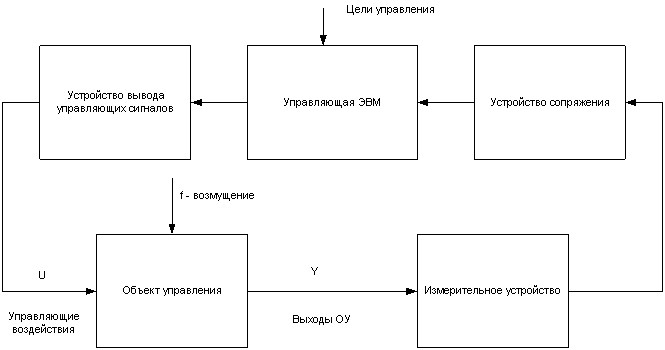
Введем в рассмотрение вектора:
- p - вектор параметров ОУ; х - вектор перенастраиваемых параметров регулятора; V - вектор управляющих воздействий на регулятор; U - вектор управляющих воздействий на ОУ; g - вектор задающих воздействий; f - вектор возмущающих воздействий.
Считаем значения векторов p, g, f нестационарными. В качестве самонастраивающейся системы управления будем рассматривать такую, которая вырабатывает управляющее воздействие на нестационарный объект при нестационарности задающих и возмущающих воздействий, обеспечивая цель и качество управления.
Задача синтеза самонастраивающейся системы управления с ЭВМ и регулятором в контуре управления может быть сформулированна следующим образом. Для заданного объекта управления передаточной матрицей WОУ(p, s), отдельные или все коэффициенты которой являются переменными, необходимо определить структуру системы управления и закон x (tm) = x (p, r, f, tm) изменения вектора настраиваемых параметров регулятора в зависимости от изменения во времени p, r, f, кроме того, требуется сформировать закон
![]()
который будет обеспечивать требуемые показатели качества функционирования системы во времени.
Задача синтеза системы управления с ЭВМ в контуре управления, на которую возлагаются все функции управления, может быть сформулированна следующим образом. Для заданного объекта управления матрицей WОУ(p, s) необходимо определить закон
![]() .
.
выработки управляющих воздействий на объект управления, который при вариации во времени p, g, f будет обеспечивать требуемые показатели качества управления объектом во времени.
Процедура синтеза закона управленияПусть структура системы управления уже выбрана или известна. В зависимости от типа синтезируемой системы управления с автоматическим регулятором или без него в контуре управления нужно различать и задачи синтеза управлений. Рассмотрим процедуру синтеза вектора V. Для того чтобы воспользоваться рассмотренными ранее положениями нужно перейти от математической модели непрерывной системы управления к модели непрерывно дискретной, квазистационарной, то есть такой модели, которая в дискретно малые интервалы времени![]() t может быть представлена системой уравнений вида:
t может быть представлена системой уравнений вида:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
