

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
где А и B – являются полиномами числителя и знаменателя передаточной функции с коэффициентами вида: ![]() ,
, ![]() .
.
Если компоненты векторов х и p находятся внутри своих границ ![]() , то и коэффициенты
, то и коэффициенты ![]() , (i =1,…,m; j = 1,…n) тоже могут варьироваться только внутри своих собственных границ, зависящих от х и p, поскольку a и b являются однозначными функциями переменных х и p, то есть
, (i =1,…,m; j = 1,…n) тоже могут варьироваться только внутри своих собственных границ, зависящих от х и p, поскольку a и b являются однозначными функциями переменных х и p, то есть


Будем считать [6], что система управления является робастно устойчивой и имеет заданное качество управления, если семейства ее полиномов ![]() и B(s, Q) удовлетворяют требованиям (3.8) – (3.9). Их сказанного следует, что семейство B(s, Q) робастно устойчиво тогда и только тогда, когда для любой реализации вектора
и B(s, Q) удовлетворяют требованиям (3.8) – (3.9). Их сказанного следует, что семейство B(s, Q) робастно устойчиво тогда и только тогда, когда для любой реализации вектора ![]() корни полинома B(s, b) располагаются в левой полуплоскости s. Отметим, что значения компонент вектора b определяются путем подстановки в их выражения значений
корни полинома B(s, b) располагаются в левой полуплоскости s. Отметим, что значения компонент вектора b определяются путем подстановки в их выражения значений ![]() и
и ![]()
Теорема. Для того чтобы многомерная система управления являлась робастно устойчивой и удовлетворяла заданным динамическим характеристикам (3.9) достаточно, чтобы F(x, p) = 0 при
![]() .
.
Доказательство. Следуя от противного, предположим, что качество управления оптимизированной по параметрам системы управления неудовлетворительно при F(x, p) = 0, где ![]() . Это означает, что расположение полюсов и нулей, соответствующее решению
. Это означает, что расположение полюсов и нулей, соответствующее решению ![]() , не удовлетворяет требованию (3.9). Следовательно, существует, по крайней мере, один полюс или нуль отличный от идеального. В рамках правила формирования целевой функции F(x, p) это означает, что она имеет хотя бы одно слагаемое отличное от нуля, что противоречит условию теоремы.
, не удовлетворяет требованию (3.9). Следовательно, существует, по крайней мере, один полюс или нуль отличный от идеального. В рамках правила формирования целевой функции F(x, p) это означает, что она имеет хотя бы одно слагаемое отличное от нуля, что противоречит условию теоремы.
Рассмотрим процедуру определения запаса робастности. Считаем известными номинальные значения компонент вектора p и возможные границы его вариации ![]() , а также считаем известным аналитическое выражение B(x, p,s). Задача состоит в том, чтобы вычислить запас робастности системы управления при
, а также считаем известным аналитическое выражение B(x, p,s). Задача состоит в том, чтобы вычислить запас робастности системы управления при ![]() . Другими словами, из более широкой области границ P, внутри которых качество системы управления неизвестно, нужно выделить подобласть, то есть такие границы
. Другими словами, из более широкой области границ P, внутри которых качество системы управления неизвестно, нужно выделить подобласть, то есть такие границы ![]() , при которых семейство полиномов
, при которых семейство полиномов
![]()
будет робастно утойчивым. Величину
| (6.8) |
будем считать мерой запаса робастности. Рассмотрим сказанное на простом примере. Пусть номинальные значения вектора варьируемых параметров равны ![]() . Наименее допустимое отклонение параметров от номинальных значений до границ интервалов составляет 1.0, то же самое значение дает формула (6.8). То есть, если параметры будут отклоняться на величину равную 1.0 или менее ее, то система управления сохранит свое качество.
. Наименее допустимое отклонение параметров от номинальных значений до границ интервалов составляет 1.0, то же самое значение дает формула (6.8). То есть, если параметры будут отклоняться на величину равную 1.0 или менее ее, то система управления сохранит свое качество.
Обратимся к интерпретации теоремы Харитонова. Доказано, что если корни четырех полиномов:
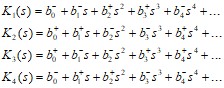
полученных из полинома характеристического уравнения, имеют отрицательные действительные части, то система управления будет сохранять устойчивость при вариации вектора p внутри границ назначенных интервалов.
Литература Основы теории автоматического управления: Автоматическое регулирование непрерывных линейных систем. – М.: Энергия, 1980. – 312 c. правочник по математике (для научных работников и инженеров). – М.: Наука, 1978г. - С.335-336. , Теория систем автоматического регулирования. – М.: Наука,1972. – 768 с. Методы классической и современной терии автоматического управления: Учебник в 3-х т.-М.: Издательство МГТУ им. ,2000. Теория автоматического управления. Линейные системы. – СПб.: Питер, 2005. – 336 с. Оптимизация многомерных систем автоматического управления на основе модификации метода корневого годографа. //Автореферат диссертации на соискание ученой степени доктора технических наук. М.: МИЭМ, 1998. – 30 с. Теория систем автоматического управления: Учеб. Пособие. – Л., Изд. Ленинградского университета,1990. - 256 с. Оптимальные и адаптивные системы. – М.: Высшая школа, 1989. – С. 37. Машинно – ориентированный метод расчета чувствительности многомерных систем управления// Приборостроение. – 1994. - №. 11 – 12. – С. 36 – 41.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
