

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Задание на начальной итерации передаточной функции регулятора и структуры системы управления дает необходимую информацию для формирования математической модели системы управления в виде передаточной функции, представленной в параметрической форме, а также дает основание для задания ее эталоной модели расположением полюсов и нулей или передаточной функцией. Это позволяет определить параметры вектора х путем решения задачи параметрической оптимизации. В случае неудовлетворительного качества синтезированной системы управления процесс синтеза сосредотачивается на двух направлениях: корректировке или усложнении эталоной модели и усложнении структуры регулятора синтезируемой системы управления. Усложнение эталоной модели осуществляется путем увеличения степени полиномов ее передаточной функции, например, вводится дополнительный полюс или нуль или даже несколько. Корректировку расположения полюсов предполагается проводить внутри области Ω.
Обобщение рассмотренной процедуры на класс многомерных систем управления касается синтеза структуры многомерного регулятора. Предполагается в качестве такого устройства рассматривать устройство, компоненты которого (локальные регуляторы каналов вход - выход) синтезируются в соответствии с изложенными выше правилами. При этом необходим учет влияния каналов друг на друга, если такое влияние существует. Эта задача, как правило, разрешима, если в качестве функции цели использовать функцию вида:
![]() ,
,
минимизация которой должна вестись по параметрам вектора х. Методика синтеза объединяет процедуру синтеза структуры регулятора с процедурой синтеза его параметров по схеме:
- синтез структуры регулятора; синтез параметров передаточной функции регулятора; анализ качества системы управления; синтез структуры регулятора; синтез параметров передаточной функции регулятора; анализ качества системы управления; … и т. д.
процесс продолжается до тех пор, пока не будет синтезирована система управления с заданными свойствами.
Синетез структур систем управления может вестись иначе, а именно с использованием типовых регуляторов: П, ПИ, ПИД. При этом нужно помнить следующее.
И - регулятор (интегральный регулятор) перемещает регулирующий орган пропорционально интегралу от отклонения регулируемой величины. Коэффициент передачи (коэффициент пропорциональности) И – регулятора численно равен скорости перемещения регулирующего органа при отклонении регулируемой величины на единицу ее измерения. По своим динамическим свойствам И – регулятор подобен интегрирующему звену. И – регуляторы могут устойчиво регулировать только объекты с самовыравниванием.
П - регулятор соответствует безинерционному звену. Пропорциональные регуляторы (П - регуляторы) перемещают реагирующий орган регулируемой величины пропорционально отклонению значения этой величины от ее заданного значения. Численно коэффициент передачи регулятора равен перемещению регулирующего органа при отклонении регулируемой величины на единицу ее измерения. При увеличении коэффициента передачи П – регулятора система может потерять устойчивость. Критическое значение коэффициента передачи соответствует нахождению системы на границе устойчивости. Пропорциональные регуляторы обладают тем свойством, что при различных нагрузках регулируемого объекта удерживают регулируемую величину на заданном уровне.
ПИ – регуляторы перемещают регулирующий орган пропорционально сумме отклонения и интеграла от отклонения регулируемой величины. Введение воздействия по интегралу в ПИ – регуляторе приводит к тому, что амплитудно – фазовая характеристика разомкнутой системы получает дополнительное отставание по фазе и увеличение по модулю, т. е. она приближается к опасной точке ( -1, j0).
ПИД – регуляторы характеризуются тем, что введение добавочного воздействия от производной регулируемой величины дает опережение по фазе, компенсируя нежелательное отставание, вводимое воздействием по интегралу, и улучшая тем самым устойчивость системы.
Дискретные и цифровые системы управления Общие сведения
Линейной системой импульсного регулирования называется такая система автоматического регулирования, которая кроме звеньев, описываемых обыкновенными линейными дифференциальными уравнениями, содержит импульсное звено, преобразующее непрерывное входное воздействие в равноотстоящие друг от друга импульсы. Рассмотрим принцип работы дискретных систем управления, которые наряду с цифровыми относятся к импульсным системам. Будем считать [5], что квантование сигналов х(t) по времени осуществляется с постоянным интервалом (периодом) Т, и сигналы дискретной системы x(kT) представлены последовательностями идеальных импульсов различной амплитуды, определенных в равноотстоящие моменты времени t = kT. Целое число
k = 0,1,2,… называется дискретным временем, а сами амплитудно - модулированные импульсные последовательности - решетчатыми функциями. С целью упрощения обозначений дискретные сигналы рассматриваемого типа часто записываются просто как функции дискретного времени x(k), т. е.
![]() .
.
Описание дискретного процесса может быть представлено как решение разностного уравнения. Наиболее распространены разностные уравнения
n – го порядка (модели вход – выход) и системы уравнений первого порядка
(модели вход – состояние - выход), а также их операторные формы. Дискретные модели либо отражают динамику реальных квантованных по времени процессов, либо являются одной из форм приближенного описания систем непрерывного действия. В последнем случае возникает необходимость рассмотрения вопросов квантования и методов преобразования динамических систем к дискретной форме, т. е. их дискретизации.
Модели дискретных процессовРазностные уравнения, описывающие динамику систем дискретного времени получаются в результате анализа реальных процессов в различные моменты дискретного времени k.
Пример 5.1. Рассмотрим цифровой накопитель (счетчик), содержимое которого в дискретные моменты времени k описывается функцией ![]()
с начальным значением ![]() . В момент k на вход счетчика поступает сигнал
. В момент k на вход счетчика поступает сигнал ![]() , в результате чего в последующий момент дискретного времени k + 1 происходит увеличение содержимого счетчика на величину этого сигнала:
, в результате чего в последующий момент дискретного времени k + 1 происходит увеличение содержимого счетчика на величину этого сигнала:
![]() (5.1)
(5.1)
Последнее выражение и является моделью счетчика, представленной в форме разностного уравнения первого порядка. Уравнение (5.1) можно записать в операторной форме. Введем в рассмотрение оператор сдвига (упреждения) z, действующий по схеме
![]()
и после элементарных преобразований получим
![]() (5.2)
(5.2)
Оператор 1/(z - 1) является передаточной функцией дискретной системы (5.1).
Пример 5.2. Проанализируем прохождение однородных предметов (товаров) в торговой системе склад – магазин, функциональная схема которой представлена на рисунке
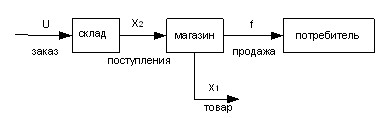
Рис. 5.1. Система склад – магазин
Здесь ![]() - число товаров в магазине,
- число товаров в магазине, ![]() - товары, поступающие со склада,
- товары, поступающие со склада, ![]() - заказанное количество товаров (заказ),
- заказанное количество товаров (заказ), ![]() - число реализованных (проданых) товаров, k – дискретное время в днях. Начальное состояние системы (в момент k =0) характеризуется значениями
- число реализованных (проданых) товаров, k – дискретное время в днях. Начальное состояние системы (в момент k =0) характеризуется значениями ![]() и
и ![]() .
.
Динамика товаров в магазине описывается разностным уравнением
![]() (5.3)
(5.3)
в котором число проданных единиц товара f(t) выступает в роли возмущающего воздействия. Полагая, что заявка выполняется складом с задержкой в один день, запишем модель склада в виде
![]() (5.4)
(5.4)
где заявка u(k) на требуемое количество товара играет роль управляющего воздействия. Если задача управления ставится как задача регулирования объема товаров в магазине, то переменная ![]() считается выходом системы:
считается выходом системы:
![]() . (5.5)
. (5.5)
Таким образом, рассматриваемая система описывается уравнениями состояния (5.3) – (5.4) и уравнением выхода (5.5). Разностные уравнения состояния связывают значения переменных состояния ![]() и
и ![]() в последующий момент дискретного времени k + 1 (следующий день) с переменными системы в текущий момент времени k. С использованием оператора сдвига z полученые разностные уравнения (5.3) – (5.4) можно привести к операторной форме:
в последующий момент дискретного времени k + 1 (следующий день) с переменными системы в текущий момент времени k. С использованием оператора сдвига z полученые разностные уравнения (5.3) – (5.4) можно привести к операторной форме:
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
