

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (1.5) |
Уравнение (1.5) является линейным с постоянными коэффициентами. Оно называется уравнением динамики в первом приближении. По виду уравнения динамики различают модели, описываемые алгебраическими уравнениями, обыкновенными дифференциальными уравнениями, дифференциальными уравнениями в частных производных, уравнениями в конечных разностях. По виду коэффициентов уравнения различают модели с постоянными (детерминированными, стационарными) коэффициентами, с переменными (недетерминированными, нестационарными) параметрами, с квазистационарными параметрами, то есть стационарными в очень малых интервалах времени. По виду временных функций, различают модели непрерывные, дискретные (цифровые), дискретно-непрерывные. Стационарные и нестационарные системы могут быть как линейными, так и нелинейными. Нестационарные системы характерны тем, что при сдвиге входного возмущения во времени без изменения формы их выходные переменные не только сдвигаются во времени, но и меняют форму. Если входные сигналы в автоматических системах могут действовать непрерывно в течение всего времени работы системы, то такая система называется непрерывной. Любая система управления, поведение которой описывается линейными дифференциальными уравнениями с постоянными коэффициентами, является стационарной линейной системой. В заключение отметим, что системы управления по виду уравнений динамики разделяются на стационарные и нестационарные, линейные и нелинейные, многомерные и одномерные, непрерывные и дискретные.
Аналитическое построение математической модели
Дифференциальное уравнение технического объекта строится следующим образом:
- выбираются обобщенные координаты (1.1), характеризующие объект; выбираются начальные условия; определяются физические или химические закономерности, которым подчиняется поведение технического объекта; выявляются факторы, влияющие на входные и выходные сигналы; при наличии нелинейных характеристик уравнение по возможности линеаризуется.
Рассмотрим процедуру вывода дифференциальных уравнений типовых звеньев на примерах анализа работы элементов электрических цепей. Для этого понадобятся знания закона Ома и законов Кирхгофа. Вспомним законы Кирхгофа:
- для токов. Алгебраическая сумма втекающих и вытекающих в узел токов равна нулю; для напряжения. Алгебраическая сумма падения напряжения на элементах замкнутого контура равна нулю.
Пример 1.1. Моделью типового апериодического звена может служить пассивная R C цепь:
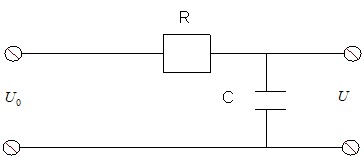
Если входным воздействием считать напряжение Uo, выходным - ![]() , и цепь считать ненагруженной, то, воспользовавшись дифференциальными уравнениями цепи, составленными на основе уравнений Кирхгофа, можно записать:
, и цепь считать ненагруженной, то, воспользовавшись дифференциальными уравнениями цепи, составленными на основе уравнений Кирхгофа, можно записать:
![]() ,
, ![]() .
.
Учитывая, что R * i + U = U0. Далее воспользуемся известной формулой зависимости тока на емкости от напряжения |
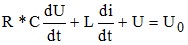
Пример 1.2. Составим дифференциальное уравнение колебательного звена, аналогом которого, может быть контур R L C.
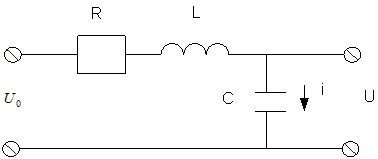
U R + U L + U C = U0; |
|
Введем обозначения: T = |
|
 ;
;  ;
; 
Отметим, что совершено различные по принципу действия и конструктивному исполнению устройства могут иметь одинаковые дифференциальные уравнения, что свидетельствует об одинаковом поведении процессов во времени. Аналогично рассмотренным примерам строится математическая модель любого технического объекта или системы.
Задачи проектирования многомерных систем управленияПроектирование многомерных систем управления включает:
формирование математической модели (уравнений) системы; расчет;
анализ; синтез. Чтобы приступить к автоматизированному проектированию, необходимо ввести информацию о системе управления. Обычно при вводе данных задаются коэффициенты уравнений, диапазоны изменения параметров, варьируемые параметры, начальные значения. Если блок управления будет синтезироваться, то задаются параметры объекта управления, его математическая модель и требования к его функционированию.
При расчете многомерных линейных непрерывных систем управления обычно используется матрица передаточных функций, на ее основе получают переходные и импульсно-переходные характеристики, рассчитывают влияние разброса параметров, строят амплитудно-частотные и фазо-частотные характеристики, определяют расположение полюсов и нулей передаточных функций. На основе расчета проводится анализ динамических характеристик, и определяются задачи дальнейшего проектирования. Обычно проектирование идет в направлении улучшения свойств системы за счет оптимальной настройки параметров. Если положительного результата добиться не удается, проектирование продолжается в направлении изменения схемы, что обеспечивает синтез. Синтез, как правило, выполняется с применением методов аналитического конструирования регуляторов (синтез структур), либо в направлении синтеза оптимальных управлений.
Отметим, что большую роль в организации автоматического или автоматизированного управления сложными объектами играет статистическая обработка информации, в результате которой должно быть принято определенное решение. При проектировании сложных систем таких как: систем одновременного управления большим количеством объектов, каждый из которых имеет возможность до некоторой степени самостоятельно определять свое поведение и принимать решения, может быть построено только на основе статистических методов.
Преобразование Лапласа. Понятие передаточной функцииПреобразование Лапласа связывает функцию F(s) (изображение) комплексной переменной s с соответствующей функцией f(t) (оригиналом) действительной переменной t. Это соответствие, по существу, взаимно однозначное для большинства практических целей. Преобразование Лапласа характерно тем, что многим соотношениям и операциям над оригиналами соответствуют более простые соотношения и операции над их изображениями. Подход заключается в преобразовании уравнения, содержащего оригиналы f(t), в эквивалентное уравнение относительно соответствующих изображений Лапласа F(s), где s = σ + jω на основе известной формулы преобразования [2]:
|
Рассмотрим часть основных свойств преобразования Лапласа, знание которых понадобится для работы с математическими моделями САУ:
- дифференцирование оригинала
|
- интегрирование оригинала
|
- линейность
|
Пусть динамика системы управления описывается уравнением вида:
|
где y(t) - управляемый параметр, g(t) - внешнее воздействие, вызывающее реакцию системы управления. Предполагаем, что имеют место нулевые начальные условия, то есть до приложения внешнего воздействия система находилась в состоянии равновесия (установившемся состоянии). Применим к обеим частям уравнения динамики преобразование Лапласа, получим:
(b |
Проследим связь входных и выходных величин:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
