

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- колебательности
μ = |Im (sдом) / Re (sдом)|; Ψ = arctg μ,
колебательность обычно имеет значение 1 - 2, но в отдельных случаях
допускается до 3;
- времени регулирования
Tрег = (1/η) ln (1/![]() );
);
- демпфирования (затухания)
![]() = 1 - exp (-2π / μ),
= 1 - exp (-2π / μ),
демпфирование допускается в пределах 90-98%;
- переходной функции
- функции веса
В введенных формулах приняты следующие обозначения: si - корень характеристического уравнения; sдом - доминантный полюс, то есть такой полюс, который имеет минимальный модуль; А(s) и В(s) – соответственно полиномы числителя и знаменателя передаточной функции замкнутой системы; n - порядок полинома В(s); ![]() - малое действительное положительное число, характеризующее максимально допустимое отклонение процесса на выходе объекта управления от заданного после окончания переходного процесса.
- малое действительное положительное число, характеризующее максимально допустимое отклонение процесса на выходе объекта управления от заданного после окончания переходного процесса.
Следует подчеркнуть, что корни полинома с действительными коэффициентами всегда являются либо действительными числами, либо попарно - сопряженными комплексными величинами.
Анализ качества САУ по переходной характеристикеСклонность системы управления к колебаниям, а также и запас устойчивости могут быть охарактеризованы максимальным отклонением значения регулируемой величины от установившегося значения. Рассмотрим график переходной характеристики и отметим основные показатели.
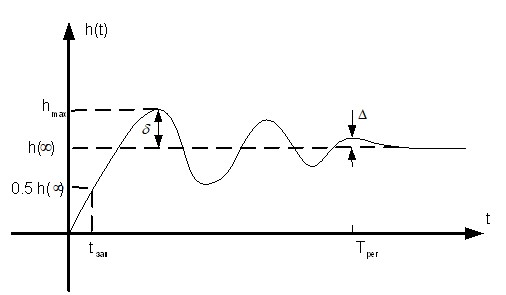
Здесь ![]() - величина перерегулирования. При анализе используют ее абсолютное или относительное значение:
- величина перерегулирования. При анализе используют ее абсолютное или относительное значение:
 100 %.
100 %.
h(∞) - установившееся значение регулируемой величины. В большинстве случаев считается, что запас устойчивости является достаточным, если перерегулирование < 30%. В ряде случаев допускается до 70%. Быстродействие системы управления может определяться по длительности переходного процесса Tрег. Длительность переходного процесса определяется временем, протекающим от момента приложения на вход системы управления единичной ступенчатой функции до момента начала выполнения неравенства:
| h(t) - h(∞) | ≤![]() ,
,
где ![]() – статическая ошибка. Иногда в качестве требования, накладываемого на работу системы управления, может задаваться допустимое число колебаний за время регулирования. Отметим еще две важные временные характеристикия, используемые при анализе качества работы системы управления:
– статическая ошибка. Иногда в качестве требования, накладываемого на работу системы управления, может задаваться допустимое число колебаний за время регулирования. Отметим еще две важные временные характеристикия, используемые при анализе качества работы системы управления:
- tзап. - время запаздывания - отрезок времени между моментом приложения входного воздействия и моментом времени, при котором величина выходного сигнала станет равной половине установившегося значения;
- время срабатывания - время между моментом приложения входного воздействия и точкой пересечения переходной характеристики с h(∞).
Анализ качества САУ по частотным характеристикам
Частотные характеристики легко находятся для любых сколь угодно сложных систем простыми графическими и алгебраическими операциями. Для построения амплитудно-частотных (АЧХ) и фазо-частотных (ФЧХ) характеристик задаются значения частот: ω1, ω2, ... и при каждом ωi по формулам А(ω) и Ψ(ω) рассчитывают ординаты характеристик, затем по полученным точкам строят графики. Рассмотрим графики этих характеристик и отметим некоторые их особенности.
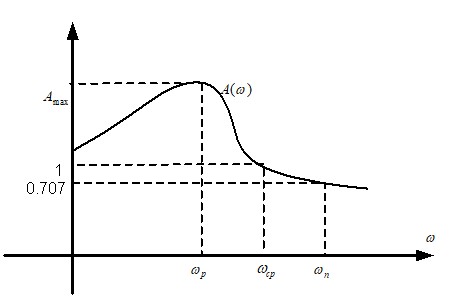
Резонансная частота ωp соответствует Аmax. Полоса частот от 0 до ωn называется полосой пропускания. Частота среза ωср соответствует амплитуде равной 1. Она характеризует быстродействие. При анализе качества САУ важными показателями считаются запас устойчивости по фазе и запас устойчивости по амплитуде. Кроме того, анализ часто включает построение логарифмических характеристик, а именно: логарифмической амплитудно-частотной характеристики L(ω) = 20lg A(ω) измеряемой в децибелах (дБ) и логарифмической фазо-частотной характеристики Ψ(ω). В качестве аргумента при построении логарифмических характеристик вместо ω используется аргумент lgω, измеряемый в декадах.
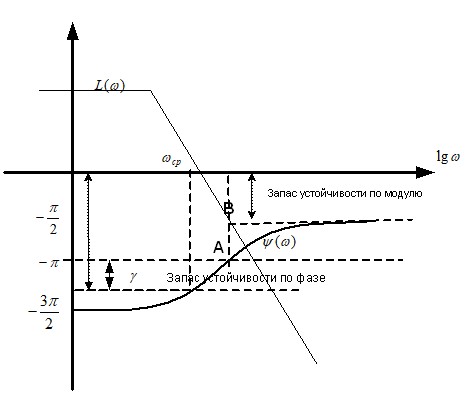
Запасом устойчивости по амплитуде называется относительное увеличение коэффициента усиления разомкнутой системы, при котором устойчивая замкнутая система доходит до границы устойчивости. Запас устойчивости по амплитуде на основе логарифмических частотных характеристик определяется следующим образом: необходимо точку А пересечения фазовой характеристики с прямой ![]() или
или ![]() спроектировать на амплитудную характеристику, тогда модуль ординаты точки В определит запас устойчивости по модулю. Запас устойчивости по фазе определяется значением фазы на частоте среза, если частотная характеристика строится относительно оси
спроектировать на амплитудную характеристику, тогда модуль ординаты точки В определит запас устойчивости по модулю. Запас устойчивости по фазе определяется значением фазы на частоте среза, если частотная характеристика строится относительно оси ![]() . Если же она строится относительно оси
. Если же она строится относительно оси ![]() , то запас устойчивости по фазе будет определяться величиной
, то запас устойчивости по фазе будет определяться величиной ![]() . Устойчивость есть необходимое условие нормального функционирования любой технической системы. Она должна иметь место не только в случае постоянства параметров, но и когда в процессе эксплуатации параметры изменяются в определенных пределах. Это может быть выполнено, если система работает не на границе устойчивости, а на некотором удалении от нее. Другими словами система управления должна обладать некоторым запасом устойчивости, обеспечивающим ее работоспособность в различных условиях эксплуатации. Рассмотрим оценку запаса устойчивости в комплексной области. Для этого обратимся к характеристическому полиному, где s заменим на jω:
. Устойчивость есть необходимое условие нормального функционирования любой технической системы. Она должна иметь место не только в случае постоянства параметров, но и когда в процессе эксплуатации параметры изменяются в определенных пределах. Это может быть выполнено, если система работает не на границе устойчивости, а на некотором удалении от нее. Другими словами система управления должна обладать некоторым запасом устойчивости, обеспечивающим ее работоспособность в различных условиях эксплуатации. Рассмотрим оценку запаса устойчивости в комплексной области. Для этого обратимся к характеристическому полиному, где s заменим на jω:
В(jω) = P(ω) + j Q(ω) ; ω =![]() .
.
Отметим, что из двух систем управления потеряет устойчивость быстрее та, у которой запас устойчивости меньше. В комплексной области в качестве меры запаса устойчивости по фазе принимается угол γ между отрицательным направлением действительной оси и лучом, проведенным из начала координат через точку, лежащую на пересечении частотного годографа B(iω) c окружностью единичного радиуса.
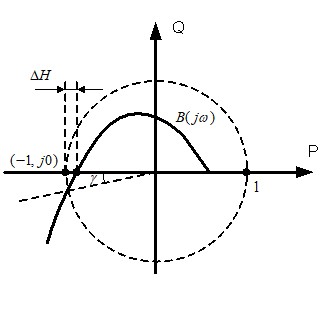
Величина ![]() H показывает расстояние от точки (-1, j0) до точки пересечения частотного годографа В(jω) с действительной осью. Она является мерой оценки запаса устойчивости по модулю.
H показывает расстояние от точки (-1, j0) до точки пересечения частотного годографа В(jω) с действительной осью. Она является мерой оценки запаса устойчивости по модулю.
Статические и астатические системы
Рассмотрим динамическую систему с одним входным воздействием x(t) [5]:
y(t) = W(p) x(t),
где
W(p) = A(p)/B(p),
А(p) = am pm + am-1p![]() +... +ao,
+... +ao,
B(p) = bnpn +bn-1 p![]() +...+ b
+...+ b![]() ,
, ![]() .
.
Будем полагать, что в данном случае в качестве входа x(t) может выступать как задающее, так и возмущающее воздействие, а под системой управления подразумевается как разомкнутая система, так и замкнутая. Для статической системы, т. е. системы, у которой b![]()
![]() 0, значение передаточной функции в точке p = 0 определяется как : W(0) =a
0, значение передаточной функции в точке p = 0 определяется как : W(0) =a![]() / b
/ b![]() = k, где k – статический коэффициент системы, и при постоянном входном воздействии х(t) = const имеет место
= k, где k – статический коэффициент системы, и при постоянном входном воздействии х(t) = const имеет место ![]() . Отметим, что для статической системы характеристическое уравнение B(p) = 0 не имеет нулевых корней. Включение статического (пропорционального) регулятора в схему управления уменьшает статизм замкнутой системы в 1/(k+1) раз, где k – коэффициент усиления разомкнутой системы, при этом увеличивается астатизм, то есть возрастает точность выполнения командного (задающего) сигнала.
. Отметим, что для статической системы характеристическое уравнение B(p) = 0 не имеет нулевых корней. Включение статического (пропорционального) регулятора в схему управления уменьшает статизм замкнутой системы в 1/(k+1) раз, где k – коэффициент усиления разомкнутой системы, при этом увеличивается астатизм, то есть возрастает точность выполнения командного (задающего) сигнала.
Теперь рассмотрим астатическую систему, полагая
b0 = b1 = …= bk-1= 0, bk ![]() 0.
0.
Ее характеристическое уравнение может быть приведено к виду

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
