

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
|
Введем функцию вида
| (1.6) |
 .
.Эта функция является передаточной. Передаточной функцией называется отношение изображений Лапласа выходной величины к входной при нулевых начальных условиях.
Передаточная функция элементов и систем является одной из важнейших характеристик, определяющих динамические свойства. Отметим, что для всех реальных (физически реализуемых) объектов степень полинома числителя передаточной функции не больше степени полинома знаменателя. Аппарат передаточных функций является эффективным при исследовании линейных стационарных систем, имеющих сложные структурные схемы. Обратный переход от изображения к оригиналу может осуществляться на основе обратного преобразования Лапласа, если оно существует. Для рациональных алгебраических функций обратное преобразование существует всегда и для его получения обычно применяется разложение Хевисайда, рассмотрим его. Пусть
A( s ) = am sm + ...+ a0, B( s ) = bn sn + ...+ b0 |
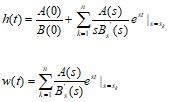
представляют собой соответственно полиномы числителя и знаменателя передаточной функции W(s). Пусть корни полинома знаменателя не кратные, тогда переходную и весовую функции можно представить на основе разложения Хевисайда следующим образом:
|
 .
.При кратных корнях полинома знаменателя применяются другие формулы, учитывающие этот факт.
Типовые воздействияТиповые воздействия это типовые функции времени, подаваемые на вход устройства, по реакции на которые определяются динамические характеристики устройства в переходном режиме. Переходным режимом считается режим перехода технического устройства из одного состояния в другое. Считается, что состояние технического устройства в фиксированный момент времени определяется значением его обобщенных координат. Рассмотрим типовые воздействия.
Типовое воздействие 1 ( t )
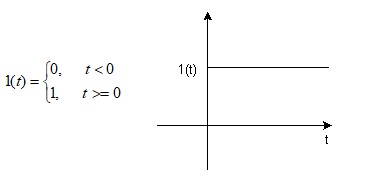
Реакция системы управления на функцию 1(t) называется переходной функцией или переходной характеристикой и обозначается h(t).
Импульсная дельта - функция
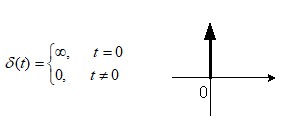
Реакция системы управления на импульсную дельта - функцию называется импульсной переходной функцией, функцией веса, весовой функцией. Обозначим ее через ![]() (t). Особенность дельта - функции заключается в том, что она имеет единичную площадь:
(t). Особенность дельта - функции заключается в том, что она имеет единичную площадь:
 .
.
Отметим, что импульсная переходная функция зависит только от интервала времени между моментом начала действия импульса ![]() и данным моментом времени t. Важно знать, что импульсная переходная функция
и данным моментом времени t. Важно знать, что импульсная переходная функция ![]() (t) системы и переходная характеристика h(t) связаны соотношением:
(t) системы и переходная характеристика h(t) связаны соотношением:
![]() .
.
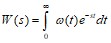
Передаточная функция непрерывной линейной стационарной системы определяется через преобразование Лапласа ее весовой функции, а именно:
Типовые воздействия 1(t) и ![]() (t) являются наиболее неблагоприятными для работы технических устройств и их элементов. Если качество управления удовлетворительно при типовых воздействиях, то тем более оно будет удовлетворительно при обычных режимах работы.
(t) являются наиболее неблагоприятными для работы технических устройств и их элементов. Если качество управления удовлетворительно при типовых воздействиях, то тем более оно будет удовлетворительно при обычных режимах работы.
Гармоническая функция
Гармонические функции на входе и выходе устройства могут быть
представленны следующим образом:
gвх (t) =Aвх sin ω t, gвых (t) =Aвых sin (ω t + Ψ).
Частотные характеристики A(ω) и Ψ(ω) описывают установившиеся вынужденные колебания, полученные при подаче на вход устройства гармонического воздействия. A(ω) - амплитудно - частотная характеристика. Ψ(ω) – фазо-частотная характеристика.
Типовые звенья обыкновенных линейных систем
Обыкновенными называют линейные системы с постоянными параметрами. После многократного применения операции разбиения практически любую техническую систему в конечном итоге можно разбить на не подающиеся дальнейшему разбиению звенья четырех типов: умножающие, суммирующие, интегрирующие, дифференцирующие. Из названных типов звеньев к динамическим относятся интегрирующие и дифференцирующие. При разбиении (декомпозиции) схемы на элементарные звенья она обычно становится чрезмерно детальной, громоздкой и малонаглядной, поэтому в системах автоматического управления широкое применение находит декомпозиция на типовые звенья несколько более сложной структуры, чем элементарные, но более соответствующие реальным элементам. Рассмотрим их.
Идеальное интегрирующее звено (интегратор)
Интегральное и дифференциальное уравнения звена имеют вид:
![]()
Здесь приняты следующие обозначения: х(t) – входной сигнал, у(t) – выходной сигнал. Воспользуемся изображением Лапласа, получим:
![]() .
.
Откуда нетрудно выразить передаточную функцию звена:
![]() .
.
Переходная функция звена, то есть реакция звена на входное воздействие
х(t) = 1(t) при начальных условиях х(0) = 0, будет следующей:
![]()
Она изображается прямой, наклоненной к оси t под углом arctg (1/T). ![]()
Импульсная переходная или весовая функция идеального интегрирующего звена является реакцией звена на типовое входное воздействие в виде импульсной дельта - функции х(t) = ![]() (t) и определяется выражением
(t) и определяется выражением
![]()
При х(t) = ![]() (t) выходная величина y(t) скачком принимает постоянное значение, которое и сохраняет в дальнейшем. Примером приближенной реализации интегратора может служить двигатель постоянного тока, у которого постоянная времени мала в сравнении с временем переходного процесса системы, в которой двигатель работает.
(t) выходная величина y(t) скачком принимает постоянное значение, которое и сохраняет в дальнейшем. Примером приближенной реализации интегратора может служить двигатель постоянного тока, у которого постоянная времени мала в сравнении с временем переходного процесса системы, в которой двигатель работает.
Идеальное дифференцирующее звено
Дифференциальное уравнение звена имеет вид:
![]()
Воспользуемся преобразованием Лапласа и перепишем последнее уравнение:
y(s) = T s x(s). .
Передаточная функция определится выражением:
![]()
Переходная характеристика такого звена определяется выражением:
![]() ,
,
где ![]() - импульсная дельта - функция. Переходная характеристика представляет собой импульс типа дельта - функции с площадью Т. Возможность представления реального звена идеальным дифференцирующим определяется соотношением постояной времени звена и дифференцируемого процесса. Чем больше инерция звена, тем с большей погрешностью оно будет дифференцировать быстро изменяющиеся функции. О близости реального звена к идеальному звену удобно судить по частотным характеристикам.
- импульсная дельта - функция. Переходная характеристика представляет собой импульс типа дельта - функции с площадью Т. Возможность представления реального звена идеальным дифференцирующим определяется соотношением постояной времени звена и дифференцируемого процесса. Чем больше инерция звена, тем с большей погрешностью оно будет дифференцировать быстро изменяющиеся функции. О близости реального звена к идеальному звену удобно судить по частотным характеристикам.
Отметим, что идеальный дифференциатор дает усиление гармонических колебаний, пропорционально частоте и опережение выходных колебаний по фазе ![]() независимо от частоты. Весьма близким к идеальному дифференцирующему звену является дифференцирующий усилитель с большим коэффициентом усиления. В той полосе частот, которая указана в паспорте усилителя, его передаточная функция
независимо от частоты. Весьма близким к идеальному дифференцирующему звену является дифференцирующий усилитель с большим коэффициентом усиления. В той полосе частот, которая указана в паспорте усилителя, его передаточная функция ![]()
Выходная величина дифференцирующего звена при гармоническом воздействии пропорциональна частоте воздействия, и звено усиливает высокочастотные помехи, что сильно затрудняет его использование. Поэтому в моделирующих устройствах обычно стремятся обойтись без дифференцирующих звеньев. Это всегда возможно, если степень числителя передаточной функции моделирующего звена не выше степени знаменателя.
Неидеальное интегрирующее звено
Строго говоря, любое реальное интегрирующее звено неидеально.
Иногда грубое интегрирование выполняют с помощью статического звена, например, с помощью пассивной RC цепи, для которой ранее было найдено уравнение динамики ![]() . При переходе в s – область уравнение принимает вид
. При переходе в s – область уравнение принимает вид ![]() или
или ![]() . Передаточная функция такого звена определится выражением:
. Передаточная функция такого звена определится выражением:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
