

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
удобной для построения структурной схемы
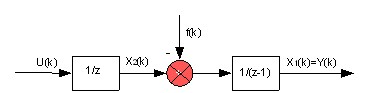
Рис. 5.2. Структурная схема склад – магазин
Модель дискретной системы может быть также представлена в форме вход – выход. Для этого уравнение (5.3) переписывается для времени k + 2:
![]()
После подстановки выражений (5.4) и (5.5), находим
![]()
Полученное разностное уравнение второго порядка связывает объемы товаров в моменты дискретного времени k+2 и k+1 с соответствующими значениями заказа u(k) и продаж f(k+1).
Для решения задачи стабилизации количества товаров в магазине y на заданном уровне ![]() может быть использована простейшая стратегия управления заказами – пропорциональный алгоритм управления
может быть использована простейшая стратегия управления заказами – пропорциональный алгоритм управления
![]()
где ![]() - отклонение, К – постоянный коэффициент. Графики процессов в такой системе при постоянном спросе f(k) = const приведены на рисунках и представлены решетчатыми функциями:
- отклонение, К – постоянный коэффициент. Графики процессов в такой системе при постоянном спросе f(k) = const приведены на рисунках и представлены решетчатыми функциями: ![]()
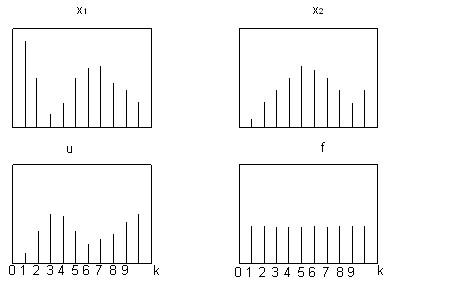
Рис. 5. 3. Процессы системы склад – магазин
Квантование непрерывных сигналов и теорема прерывания
Процедура преобразования сигнала непрерывного времени x(t) к дискретному (квантованному по времени) виду называется квантованием (рис. 5.4). Такая процедура отражает как реальные процессы, происходящие в цифровых системах управления, так и математические операции, использующиеся в различных сферах теории информации.
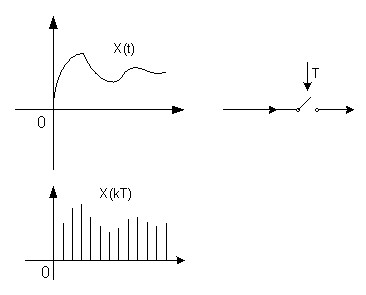
Рис. 5.4. Квантование непрерывного сигнала
В результате квантования получается импульсная последовательность
x(kT) (решетчатая функция), которая при t = kT совпадает с исходным сигналом:
![]() ,
,
а в другие моменты времени она не определена. Потеря информации при квантовании зависит от величины интервала квантования Т или частоты квантования
![]() .
.
Выбор интервала Т обычно осуществляется из соображений теоретической
возможности восстановления исходного сигнала по полученой в результате квантования импульсной последовательности (дискретной выборке), что отражает содержание известной теоремы прерывания (теоремы Котельникова – Шеннона).
Рассмотрим задачу нахождения сигнала x(t) по известной решетчатой функции x(kT), полагая, что спектр сигнала x(t) ограничен частотой ![]() .
.
Тогда в соответствии с теоремой прерывания, точное восстановление функции x(t) теоретически возможно при условии, что частота квантования
![]() более чем в 2 раза превосходит наибольшую частоту
более чем в 2 раза превосходит наибольшую частоту ![]() :
:
![]() ,
,
а для интервала квантования выполняется
![]() .
.
Приведенный результат широко используется в задачах идентификации динамических систем и дискретизации непрерывных моделей.
Использование z - преобразования
Для решетчатых функций времени может быть введено понятие дискретного преобразования Лапласа, определяемое формулой [3]
![]() , (5.6)
, (5.6)
где ![]() ,
, ![]() - абсцисса абсолютной сходимости. Если
- абсцисса абсолютной сходимости. Если ![]() , то ряд, определяемый формулой (5.6) сходится и решетчатой функции соответствует некоторое изображение, являющееся функцией величины
, то ряд, определяемый формулой (5.6) сходится и решетчатой функции соответствует некоторое изображение, являющееся функцией величины ![]() .
.
Для исследования импульсных систем большое распространение получило так называемое z![]() - преобразование, которое связано с дискретным преобразованием Лапласа и вытекает из него.
- преобразование, которое связано с дискретным преобразованием Лапласа и вытекает из него.
Под z – преобразованием понимается изображение решетчатой функции, определяемое формулой
![]() . (5.7)
. (5.7)
Здесь введено обозначение ![]() . Откуда следует, что z – преобразование
. Откуда следует, что z – преобразование
практически совпадает с дискретным преобразование Лапласа и отличается только обозначением аргумента изображения. Из основного выражения следует:
![]()
Рассмотрим разностное уравнение вида
![]() .
.
Если ввести предположение, что решетчатая функция y[n] тождественно равна нулю при n < 0 и, кроме того, функция f[n] прикладывается в момент времени n = 0, то переход к z - изображению дает
![]()
Изображение искомой решетчатой функции можно представить в виде
![]()
Здесь введена дискретная передаточная функция W(z), которая, как и в случае непрерывных функций, есть отношение двух изображений (выходной и входной величин) при нулевых начальных условиях. Дискретная передаточная функция играет такую же роль в дискретных и цифровых система, как и обычная передаточная функция в непрерывных системах.
Устойчивость и качество дискретных систем
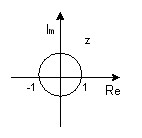
В дискретных системах автоматического регулирования устойчивость будет иметь место, если все полюсы передаточной функции замкнутой системы, т. е. корни характеристического уравнения, лежат в левой полуплоскости области s. Границей устойчивости является мнимая ось. Для построения области устойчивости в плоскости комплексной величины z отобразим мнимую ось плоскости s на плоскость z. Для этой цели необходимо сделать подстановку ![]() и менять затем частоту
и менять затем частоту ![]() в пределах от
в пределах от ![]() до
до ![]() . Таким образом, получаем
. Таким образом, получаем ![]() . При изменении частот в указанных пределах на плоскости z получится окружность единичного радиуса, представляющая собой область устойчивости. Условием устойчивости будет расположение особых точек (полюсов) передаточной функции замкнутой системы Ф(z), внутри этой окружности. Корни характеристического уравнения должны быть ограничены по модулю:
. При изменении частот в указанных пределах на плоскости z получится окружность единичного радиуса, представляющая собой область устойчивости. Условием устойчивости будет расположение особых точек (полюсов) передаточной функции замкнутой системы Ф(z), внутри этой окружности. Корни характеристического уравнения должны быть ограничены по модулю: ![]()
Отметим очень важное требование. Передаточная функция устойчивой стационарной дискретной линейной системы должна быть конечна всюду вне единичного круга плоскости комплексного переменного z с центром в начале координат.
Оценка качества дискретной системы регулирования может делаться построением кривой переходного процесса, что при использовании z – преобразования осуществляется сравнительно легко, а также посредством
различных критериев качества. Наиболее простым является использование показателя колебательности, который может характеризовать запас устойчивости системы. Как и в случае непрерывных систем, получение заданного показателя сводится к требованию, чтобы амплитудно – фазовая характеристика системы не заходила в запретную зону, окружающую точку
(-1, j0). Точность импульсной системы может оцениваться по коэффициентам ошибок. Аналогично непрерывным системам, начиная с некоторого момента времени ошибку дискретной системы регулирования можно представить в виде ряда
![]()
где y - выходной сигнал, g – входной сигнал, ![]() - коэффициенты ошибок, которые представляют собой коэффициенты разложения передаточной функции
- коэффициенты ошибок, которые представляют собой коэффициенты разложения передаточной функции ![]() по ошибке в ряд Маклорена по степеням s:
по ошибке в ряд Маклорена по степеням s:
 .
.
Величины, обратные коэффициентам ![]() могут называться соответствующими добротностями. Например, добротность по скорости
могут называться соответствующими добротностями. Например, добротность по скорости

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
