

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
является не полностью управляемой, а система управления, представленная уравнениями вида:
является не полностью наблюдаемой.
Инвариантные системы управления
Вариации параметров системы управления, вызванные внешними возмущающими воздействиями или возмущающими факторами, действующими внутри системы управления, способствуют появлению дополнительного движения, которое при неконтролируемых изменениях параметров обычно является нежелательным. В связи с этим возникает проблема синтеза таких систем управления, которые были бы способны компенсировать нежелательные параметрические возмущающие воздействия.
В качестве математической модели системы управления будем рассматривать передаточную функцию W(x, h, s), где х - вектор настраиваемых параметров управляющей части, h – вектор неконтролируемых параметров. Синтез инвариантных систем управления обычно осуществляется с использованием показателей качества и ограничений, налагаемых на параметры. За показатели качества, характеризующие дополнительное движение, вызванное возмущающими воздействиями, могут приниматься максимальное отклонение дополнительного движения
![]()
или интегральное квадратичное отклонение вида:
 .
.
Среди задач синтеза инвариантных систем выделяются задачи, в которых требования малой чувствительности формализованы в виде ограничений на дополнительное движение или на функцию чувствительности. В качестве ограничений могут использоваться соотношения:

Здесь приняты следующие обозначения: ![]() - функция чувствительности, ε - точность. Отметим, что системы абсолютно инвариантные как и системы с нулевой чувсвительностью к изменению неконтролируемых параметров физически не реализуемы. Системы параметрически инвариантные до ε и системы с ε - чувствительностью принципиально могут быть физически реализованы. Рассмотрим класс систем управления, описываемых в комплексной плоскости системой уравнений, представленной формулой:
- функция чувствительности, ε - точность. Отметим, что системы абсолютно инвариантные как и системы с нулевой чувсвительностью к изменению неконтролируемых параметров физически не реализуемы. Системы параметрически инвариантные до ε и системы с ε - чувствительностью принципиально могут быть физически реализованы. Рассмотрим класс систем управления, описываемых в комплексной плоскости системой уравнений, представленной формулой:
Y(x, h,s) = W(x, h,s) G(s), | (6.2) |
где Y и G соответственно изображения сигналов на выходе и входе системы управления, W – передаточная функция системы управления, коэффициенты которой выражены явно через компоненты векторов х и h. За характеристику дополнительного движения, вызванного вариацией вектора h, выберем суммарное отклонение сигналов на выходе объекта управления вследствие отклонения параметров вектора h от номинальных (расчетных) значений h![]() и запишем его в виде [9]:
и запишем его в виде [9]:
| (6.3) |
где q – размерность вектора h. Дополнительное движение при вариации неконтролируемого параметра h![]() , возникающее на выходе системы управления определим выражением:
, возникающее на выходе системы управления определим выражением:

Тогда ограничение на модуль дополнительного движения может быть представлено условием:
| (6.4) |
Систему управления назовем параметрически инвариантной до ε, если при вариации h дополнительное движение, возникшее в системе управления, не нарушит ограничение (6.4).
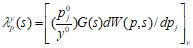
Расчет и анализ чувствительностиОсновной задачей теории чуствительности является анализ дополнительного движения вызванного вариацией параметров. Такой анализ, в частности, включает количественные оценки, характеризующие влияние одних параметров на другие или на качество технической системы в целом. Обычно анализ дополнительного движения строится на основе нахождения функций чувствительности, получаемых в результате решения дифференциальных уравнений называемых уравнениями чувствительности. Вместе с тем применяются различные косвенные оценки, в том числе частотные или корневые. Будем рассматривать моделирование динамики системы управления в комплексной плоскости. Вектором параметров, по отношению к которому требуется оценить чувствительность системы управления, выберем вектор p. Компонентами вектора могут быть коэффициенты передаточных функций элементов управляющей части системы или объекта управления. В качестве исследуемой характеристики, изменяющейся при вариации p, выберем управляемую переменную y на выходе объекта управления. Тогда чувствительность y к p может быть представлена вектором
| (6.5) |
для системы управления, описываемой системой уравнений вида
Y( p, s) = W( p, s) G(s). | (6.6) |
В формуле (6.5) v – размерность вектора p, ![]() - начальное (номинальное) значение параметра
- начальное (номинальное) значение параметра ![]() ,
, ![]() - установившееся значение выходного сигнала при
- установившееся значение выходного сигнала при ![]() . Частные производные, входящие в формулу (6.5), вычисляются в точке
. Частные производные, входящие в формулу (6.5), вычисляются в точке ![]() .
.
Рассмотрим вопрос количественной оценки чувствительности установившегося режима к вариации параметров вектора p. Для этого положим s = 0 и G(s) = 1/s. В силу принятых допущений выражение (6.5) значительно упростится без потери существенной информации относительно установившегося режима:
| (6.7) |
Расчет чувствительности ![]() включает этапы:
включает этапы:
- задание структуры и состава системы управления, вектора
 ; определение
; определение Если анализ диктует необходимость рассмотрения функций чувствительности для установления влияния вектора p на динамику системы управления, то s в формуле (6.7) не должно обнуляться и от полученных функций ![]() следует перейти к временным функциям
следует перейти к временным функциям ![]() на основе известного разложения Хевисайда рациональной алгебраической функции.
на основе известного разложения Хевисайда рациональной алгебраической функции.
Робастные системы управления
Проектирование робастных систем управления – одна из сложных проблем современной теории управления. Свойство систем управления обеспечивать устойчивость при вариации параметров объекта управления в определенных пределах называется робастной устойчивостью. Отметим, что устойчивость является одним из самых важных свойств систем управления, но не единственным. Такие важные характеристики управления как точность, время регулирования, перерегулирование должны обеспечиваться также на приемлемом уровне. Свойство системы управления выполнять заданные требования на качество при вариации параметров объекта управления можно определить как свойство робастности в более широком смысле, чем робастная устойчивость. Ограничения на качество управления могут назначаться как во временной, так и в комплексной области. Для исследования робастной устойчивости систем управления на практике используется подход, базирующийся на результатах теоремы Харитонова, дающий заключение о робастной устойчивости на основе алгебраического анализа корней четырех полиномов.
Рассмотрим вопрос проектирования робастно устойчивых систем управления с заданным качеством управления. Представим передаточную функцию в виде
 ,
,
где х – вектор настраиваемых параметров управляющей части, p - вектор квазистационарных параметров объекта управления. Пусть

Границы ![]() включают номинальные значения параметров
включают номинальные значения параметров ![]() , а также их возможные вариации под действием внешних и внутренних факторов. Для того чтобы найти зависимость х = х (p), которая бы позволяла настраивать х по известным реализациям p, обеспечивая требуемое качество управления, воспользуемся моделированием процессов в комплексной плоскости, что позволит сформировать целевую функцию
, а также их возможные вариации под действием внешних и внутренних факторов. Для того чтобы найти зависимость х = х (p), которая бы позволяла настраивать х по известным реализациям p, обеспечивая требуемое качество управления, воспользуемся моделированием процессов в комплексной плоскости, что позволит сформировать целевую функцию
![]()
на основе приближения проектируемой системы управления к эталоной. Введем в рассмотрение семейство полиномов:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
