

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В этой связи предлагается иной подход к определению энтропии режимов детерминированного хаоса. Сущность предлагаемого подхода состоит в том, что обнаруженная эквивалентность с точностью до масштабного коэффициента величины приращения энтропии и величины плотности энергетического спектра случайных процессов, которая позволяет определять одну из этих величин через другую величину, является новым научным результатом с физической и математической точек зрения и послужит основанием для обобщения полученного результата на хаотические процессы, которые имеют индивидуальные величины плотности энергетических спектров и которые с точностью до масштабного коэффициента подобия совпадают с индивидуальным приращением энтропии тех же хаотических процессов как это приведено на рисунках 3.3, 3.4.
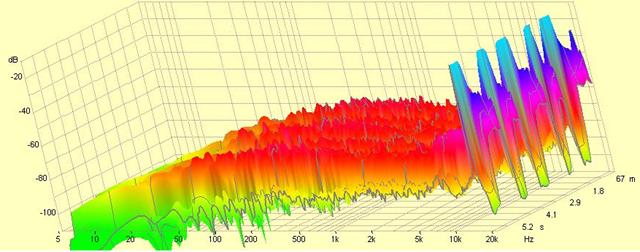
Рисунок 3.3 – Изменение текущей энтропии напряжения UR2
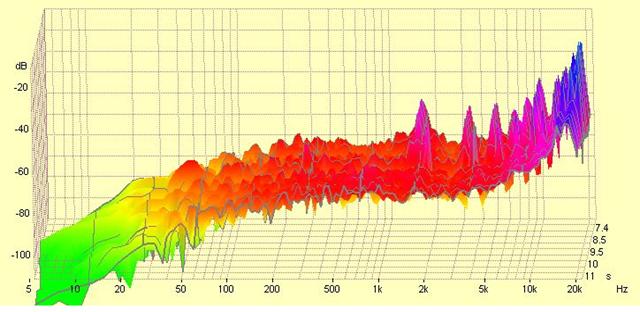
Рисунок 3.4 – Изменение плотности энергетического спектра напряжения UR2
Понятие «энтропия» через эквивалентное ему понятие «плотность энергетического спектра» как для случайного, так и хаотического процессов связывает воедино философские категории «Случайность» и «Хаос». Энтропия становится тем обручем, который стягивает ранее несоединимые в физическом и математическом аспектах сущности – случайные и хаотические явления. Но тогда проявляется следующее: хаос имеет две стороны и эти стороны проявляются как процессы детерминированного хаоса, не имеющие распределение вероятности, и как случайные процессы с некоторым распределением вероятностей, но плотность энергетического спектра имеет место быть и для хаотических, и для случайных процессов.
Результатом выполненных исследований являются разработанные алгоритмы, проверка которых осуществлялась на тестовых задачах и которые позволяют определять бифуркационные параметры ЭС ГИ и их численные значения, анализировать связанные с бифуркациями различные типы решений, включая хаотические режимы, минимизировать потери активной мощности по критерию энтропийной устойчивости во всех режимах работы, включая режимы детерминированного хаоса, что в реальных условиях ведет к экономической эффективности и энергосбережению на всех этапах эксплуатации ЭС ГИ.
В этом отношении необходимо указать, что ЭС ГИ со слабой положительной обратной связью (СПОС), а наличие хотя бы одной спонтанно возникающей СПОС является необходимым условием появления режима детерминированного хаоса, всегда превращают всю свою свободную энергию в работу против ожидаемого равновесия. В режимах детерминированного хаоса, когда в ЭС ГИ имеет место СПОС, ЭС ГИ обязана работать против ожидаемого равновесия. В хаосе равновесия не может быть, и, хотя через бифуркации меняется тип решения, но к равновесию ЭС ГИ не приходит.
В точках бифуркации происходит смена типов решений, т. е. происходит смена пространственно-временной организации ЭС ГИ, но вдали от равновесия каждая подсистема «видит» всю ЭС ГИ в целом, а в равновесии ЭС ГИ «слепа». Отсюда следует, что вдали от положения равновесия когерентность поведения подсистем ЭС ГИ в огромной степени возрастает.
Выражение (2.35) является основным соотношением для определения энтропии ЭС ГИ через нормированную МКМ ![]() случайного вектора Y. Тогда приращение текущей энтропии ЭС ГИ найдется как
случайного вектора Y. Тогда приращение текущей энтропии ЭС ГИ найдется как
![]() . (3.7)
. (3.7)
Выражение (3.7) является обобщением формулы для определения энтропии двух связанных между собой случайных процессов, полученной в [3], на случай n связанных между собой случайных процессов.
Выражение (3.7) дает возможность определить Н за время [t0, t1], если коэффициенты разложения элементов матрицы Q(t) отыскивать за время [t0, t1]. Изменение энтропии ЭС ГИ за время [t1, t1+Dt] можно проследить, если определить коэффициенты разложения элементов матрицы Q(t) уже за время [t1, t1+Dt]. Таким образом, становится возможным рассчитать энтропию ЭС ГИ как функцию времени, так как найдена процедура определения H(ti) для всех ti по предыдущим значениям.
Потоки энтропии в ЭС ГИ на отдельных участках определяются МКМ ![]() по (3.7), но используются коэффициенты корреляции только тех компонентов вектора Y, которые имеют отношение к этим участкам ЭС ГИ. Тем самым соблюдается аддитивный принцип, характерный для энтропии: сумма энтропии отдельных участков ЭС ГИ равна энтропии всей ЭС ГИ.
по (3.7), но используются коэффициенты корреляции только тех компонентов вектора Y, которые имеют отношение к этим участкам ЭС ГИ. Тем самым соблюдается аддитивный принцип, характерный для энтропии: сумма энтропии отдельных участков ЭС ГИ равна энтропии всей ЭС ГИ.
Опираясь на полученные результаты работы, приходим к выводу о том, что если текущая энтропия отлична от нуля, то появляется область S оптимальных инвариантных решений. Увеличение текущей энтропии приводит к увеличению области S. Это означает, что увеличивающаяся неопределённость в достижении цели управления ЭС ГИ делает лишённой смысла замену старого оптимального решения на другое оптимальное решение при изменившихся условиях функционирования. При этом дается оценка состоятельности старого оптимального решения.
3.2 Энтропийные аспекты эффективности, устойчивости и живучести
Управление ЭС ГИ представляет собой иерархическую структуру, которая характеризуется информационными ресурсами (ИР). К последним относятся ЭВМ, каналы связи, программы, датчики информации и т. д.
Очевидно, чем больше в системе ИР (будем исходить из их рационального использования), тем более эффективной будет функционирование ЭС ГИ. Для каждой данной ЭС ГИ и для каждого уровня технологии имеется своя функциональная связь между эффективностью работы ЭС ГИ и ИР. Формирование структуры управления ЭС ГИ в той или иной степени сводится к распределению ИР между возможными ситуациями в ЭС ГИ, т. е. между некоторым конечным набором ситуаций от S1 до Sn, Последние при неблагоприятных условиях могут вызывать возникновение аварийных режимов, связанных с ущербами для системы вплоть до потери ее живучести, т. е. прекращения ее существования как единого целого [15].
Выделение необходимого ИР на покрытие экстремальных ситуаций позволяет предотвратить переход их в «угрожающие аварией» режимы. Возникновение угрожающего аварией режима как результат неблагоприятного разрешения экстремальной ситуации всегда связано с выходом каких-либо обобщенных параметров за действительно опасную границу области цели. Переход вектора состояния ЭС ГИ за опасную границу i-й цели можно рассматривать как потерю энтропийной устойчивости по i-й цели. Исходя из причин, вызывающих такие явления, можно выделить три основных типа энтропийной устойчивости рассматриваемой системы по отношению к i-й цели: устойчивость в малом, устойчивость в большом (соответственно при малых и больших возмущениях) и устойчивость в колебательном режиме (при колебательных возмущениях в определенном диапазоне частот).
Учитывая изложенное, целесообразно с системных позиций говорить об ориентированной энтропийной устойчивости, т. е. устойчивости по i-й цели при j-м типе возмущающего воздействия. Тогда ij-ориентированной энтропийной устойчивостью будем называть способность рассматриваемой подсистемы не допускать перехода ее вектора состояния через опасные границы области i-й цели при j-м типе возмущающего воздействия.
В зависимости от того, является ли i-я цель определяющей или дополняющей для вышестоящей j-й цели, а также от длительности нарушения энтропийной устойчивости по i-й цели, ответственного за достижение i-й цели, возможны различные последствия из-за энтропийной неустойчивости по i-й цели.
По характеру влияния нарушения энтропийной устойчивости по i-й цели на другие цели оно может быть: локальным — не оказывающим существенного воздействия на функционирование ЭС ГИ в отношении других целей; развивающимся и вызывающем возникновение каскада нарушений энтропийной устойчивости. Если этот каскад нарушений энтропийной устойчивости захватывает цели, связанные с поддержанием самого существования ЭС ГИ как единого целого, то можно сказать, что произошло нарушение живучести ЭС ГИ.
Когда область i-й цели имеет несимметричный характер и зона S полного достижения i-й цели оказывается расположенной недопустимо близко к опасной границе, то встает проблема выбора необходимого запаса энтропийной устойчивости, который обеспечит поддержание вектора состояния ![]()
![]() в некоторой зоне S', увеличенной по отношению к зоне S на некоторую величину. Повышая запас по энтропийной устойчивости, мы, тем самым, будем ухудшать показатель эффективности функционирования ЭС ГИ в базисных режимах, поскольку ЭС ГИ теперь работает не в зоне S, а в зоне S'. Итак, для повышения устойчивости в угрожающих аварией ситуациях необходимо идти на снижение эффективности функционирования в базовых режимах.
в некоторой зоне S', увеличенной по отношению к зоне S на некоторую величину. Повышая запас по энтропийной устойчивости, мы, тем самым, будем ухудшать показатель эффективности функционирования ЭС ГИ в базисных режимах, поскольку ЭС ГИ теперь работает не в зоне S, а в зоне S'. Итак, для повышения устойчивости в угрожающих аварией ситуациях необходимо идти на снижение эффективности функционирования в базовых режимах.
Как потеря энтропийной устойчивости по какой-либо i-й цели, так и каскад нарушений энтропийной устойчивости имеют свою скорость развития, которую можно характеризовать скоростью возрастания неопределенности. Причем здесь возникает не только информационная проблема - быстро выявить начало развития процесса, ведущего к нарушению энтропийной устойчивости по i-й цели, и выработать оптимальный закон управления, но и проблема наличия достаточно быстродействующих и мощных исполнительных органов, способных оказывать на ЭС ГИ сильные управляющие воздействия.
3.3 Энтропийная устойчивость и чувствительность режимов функционирования
Качество функционирования ЭС ГИ в большей степени зависит от чувствительности показателей качества к изменениям параметров системы (ПС). Анализ чувствительности позволяет решить задачу настройки параметров ЭС ГИ для достижения ПКФ, что входит составной частью в типичную задачу проектирования: при фиксированном наборе номинальных параметров ЭС ГИ должна работать наилучшим образом и обеспечивать экстремальные значения ПКФ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
