

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Имеется последовательность измерений углового вектора  и последовательность измерений частотного вектора
и последовательность измерений частотного вектора ![]() , k=0, 1, …, N,
, k=0, 1, …, N, ![]() является периодом квантования,
является периодом квантования, ![]() является интервалом измерения, а m – число генераторов.
является интервалом измерения, а m – число генераторов.
Шаг 1: Использование  и
и ![]() для идентификации классических уравнений колебания.
для идентификации классических уравнений колебания.
Шаг 2: Вычисление ![]() из идентифицированных классических уравнений колебания. Использование знака
из идентифицированных классических уравнений колебания. Использование знака ![]() как показателя обнаружения переходных хаотических колебаний.
как показателя обнаружения переходных хаотических колебаний.
Пояснение шага l: Принимая во внимание, что ЭС ГИ включает в себя m генераторов, классические уравнения колебаний имеют вид [9]
 (4.5)
(4.5)
где ![]() – i-я составляющая
– i-я составляющая ![]() и Pi, Di, Bij, Gij, Тji, Ei – соответственно генерируемая активная мощность, энергия демпферной обмотки, реактивная проводимость, активная проводимость, момент инерции и напряжение (ЭДС) i-го генератора.
и Pi, Di, Bij, Gij, Тji, Ei – соответственно генерируемая активная мощность, энергия демпферной обмотки, реактивная проводимость, активная проводимость, момент инерции и напряжение (ЭДС) i-го генератора.
Устанавливаем параметры ЭС ГИ:
 ,
,  ,
,  и
и  . (4.6)
. (4.6)
Тогда  может быть аппроксимировано последовательно измеренными частотами, а именно
может быть аппроксимировано последовательно измеренными частотами, а именно
 (4.7)
(4.7)
Пояснение шага 2: Пусть уравнения  идентифицируют колебания в уравнении (4.7). Соответствующее уравнение может быть найдено из (4.2). Выбираем начальное возмущение
идентифицируют колебания в уравнении (4.7). Соответствующее уравнение может быть найдено из (4.2). Выбираем начальное возмущение ![]() приближенно равным начальному значению углового вектора
приближенно равным начальному значению углового вектора ![]() . Интегрируя уравнение (4.7) за ΔТ секунд, получаем
. Интегрируя уравнение (4.7) за ΔТ секунд, получаем
![]() (4.8)
(4.8)
Повторяем эту процедуру интегрирования по всему интервалу N раз. Тогда самый большой показатель Ляпунова, заключенный на интервале  , вычисляется следующим образом:
, вычисляется следующим образом:
 (4.9)
(4.9)
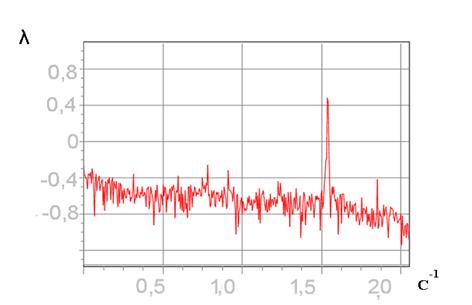
Рисунок 4.1 Характеристические показатели Ляпунова для математической модели (4.5), (4.9).
Алгоритм и программа зарегистрированы в объединенном фонде электронных ресурсов «Наука и образование» РАО [42].
4.2 Имитационная схема замещения с положительными обратными связями для моделирования хаотических режимов
Дифференциальные уравнения созданной и апробированной имитационной электронной модели, схема замещения которой показана на рисунке 4.2, структурно подобны дифференциальным уравнениям ЭС ГИ с системами управления АРС, АРВ отдельных генераторов и системами противоаварийной автоматики АЧР, САОН. Имитационная модель позволяет проводить анализ энтропийной устойчивости и, следовательно, синхронизации в условиях хаотических режимов для ЭС ГИ. Под синхронизацией понимают самопроизвольное установление в ЭС ГИ автоколебаний единой синхронной частоты, устойчивых к возмущениям относительно колебаний в отдельных подсистемах ЭС ГИ.
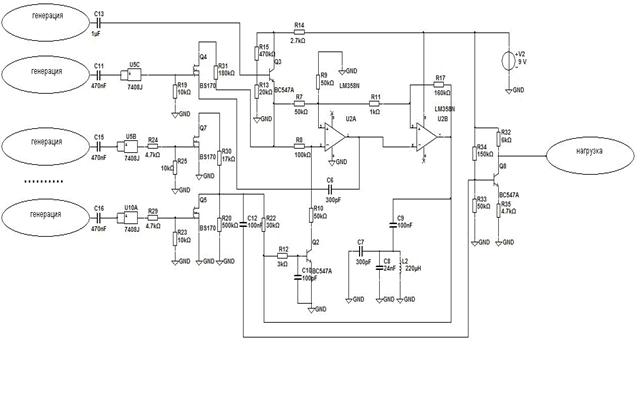
Рис. 4.2 Имитационная электронная модель ЭС ГИ
Имитационная модель предполагает моделирование ЭС ГИ, состоящей из синхронных генераторов без учета демпферных обмоток, и параметры схемы замещения которой определяются по известным паспортным и конcтруктивным данным, а приближенный расчет индуктивных сопротивлений по продольным и поперечным осям проводится с использованием Uкз,%. Имитационная модель одного из генераторов, входящего в состав ЭС ГИ, показанная на рисунке 4.3, включает в себя систему управления с контурами регулирования частоты (АРС) и амплитуды выходного напряжения (АРВ) синхронного генератора. Моделирование режимов нагрузки возможно в пределах от 10% до 110% мощности, при этом обеспечено выполнение требований к показателям качества генерируемого напряжения при превышении нагрузочной мощности на 10% выше номинальной. Погрешность расчета параметров схемы замещения имитационной модели по продольной (Хd) и поперечной (Хq) осям не должна превышать 1,6% и 1,2% соответственно [1].
Результатом выполненных исследований являются разработанные алгоритмы, проверка которых осуществлялась на тестовых задачах, которые позволяют определять бифуркационные параметры ЭС ГИ и их численные значения, анализировать связанные с бифуркациями различные типы решений, включая хаотические решения, минимизировать потери активной мощности по критерию энтропийной устойчивости во всех режимах работы, включая режимы детерминированного хаоса, что в реальных условиях ведет к экономической эффективности и энергосбережению на всех этапах эксплуатации ЭС ГИ.
В этом отношении необходимо указать, что ЭС ГИ со слабой положительной обратной связью (СПОС), а наличие хотя бы одной спонтанно возникающей СПОС является необходимым условием возникновения режимов детерминированного хаоса, всегда превращает всю свою свободную энергию в работу против ожидаемого равновесия. В режимах детерминированного хаоса, когда в ЭС ГИ имеет место СПОС, ЭС ГИ обязана работать против ожидаемого равновесия. В хаосе равновесия не может быть, и, хотя через бифуркации меняется тип решения, но к равновесию ЭС ГИ не приходит.
Как упоминалось ранее, в точках бифуркации происходит смена типов решений, т. е. происходит смена пространственно-временной организации ЭС ГИ, но вдали от равновесия каждая подсистема «видит» всю ЭС ГИ в целом, а в равновесии ЭС ГИ «слепа». Отсюда следует, что вдали от положения равновесия когерентность поведения подсистем ЭС ГИ в огромной степени возрастает.
Таким образом, имитационная параметрическая модель позволила объединить данные измерений и численно-аналитические эксперименты на ЭВМ.
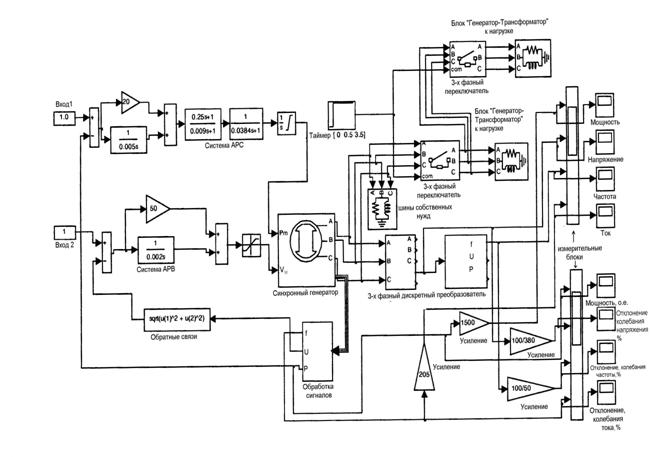
Рисунок 4.3. Имитационная модель синхронного генератора [24]
4.3. Энтропийная модель режимов детерминированного хаоса в электротехнической системе с одним генератором
Рассмотрим энтропийную устойчивость (неустойчивость) возникающих режимов детерминированного хаоса в ЭС ГИ с одним генератором, изображенной на рисунке 1.2. В нее входит генератор, снабжающий энергией динамически изменяющуюся во времени нагрузку или стационарную во времени нагрузку и линия электропередачи.
Изменение текущей энтропии режимов детерминированного хаоса будем определять через спектральную энергетическую плотность, характеризующую мощность (энергию) хаотических режимов. Характер изменения спектральной энергетической плотности позволит сделать вывод об энтропийной устойчивости (неустойчивости) режимов детерминированного хаоса и, следовательно, предсказать последующую эволюцию хаотических режимов.
Нелинейные дифференциальные уравнения состояния и параметры схемы замещения ЭС ГИ, необходимые для анализа хаотических режимов частоты и отклонений частоты ![]() , напряжений и отклонений напряжения
, напряжений и отклонений напряжения ![]() имеют вид [45]
имеют вид [45]
 (4.10)
(4.10)
где ![]() - колебания фазового угла на шинах генератора,
- колебания фазового угла на шинах генератора,
![]() - колебания фазового угла в линии электропередачи,
- колебания фазового угла в линии электропередачи,
![]() - отклонение угловой частоты от номинального значения,
- отклонение угловой частоты от номинального значения,
![]() - напряжение в конце линии электропередачи (на шинах нагрузки),
- напряжение в конце линии электропередачи (на шинах нагрузки),
![]() - переменное значение реактивной мощности.
- переменное значение реактивной мощности.
Здесь ![]() - вектор переменных состояния,
- вектор переменных состояния,
![]() -совокупность параметров ЭС ГИ,
-совокупность параметров ЭС ГИ,
(δ(0)=0.3, ω(0)=0÷1.55, δЛ(0)=0.2, UЛ(0)=0.97) – совокупность начальных условий.
Численное интегрирование (4.10) проводилось при следующих значениях параметров ЭС ГИ в относительных единицах:

Начальное значение отклонений угловой частоты ![]() медленно меняется в диапазоне 0
медленно меняется в диапазоне 0![]() 1,55 рад/c.
1,55 рад/c.
Бифуркационное значение Q1в принимаем равным 10,89 (произошел наброс нагрузки). Это значение определяется неоднократным численным интегрированием систем дифференциальных уравнений (4.10) до тех пор, пока не появляется хаотический режим.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
