

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Критерий инвариантности (3.15) соответствует максимальной текущей энтропии. Доказательство этого положения проводилось на имитационной модели ЭС ГИ, и результаты исследований представлены в приложении.
В сущности s2(x) есть ни что иное, как максимально возможная дисперсия области S в n-мерном пространстве и любое решение х, не выходящее за границы s2(x) , является приемлемым квазиоптимальным решением.
Многовариантные экспериментальные исследования на имитационной модели ЭС ГИ, приведенные в приложении, подтвердили этот результат. На рисунке 3.5 приведена полученная в эксперименте №7 максимально возможная дисперсия области S для двухмашинной ЭС ГИ.
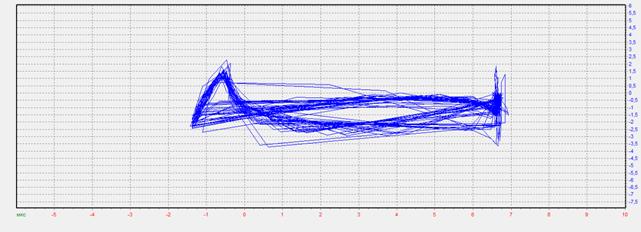
Рисунок 3.5 Максимально возможная дисперсия области S для двухмашинной ЭС ГИ.
3.3.2 Энтропийные модели каскадного развития «угрожающего аварией» режима и живучести
На XXVII сессии международной конференции по большим электрическим системам (СИГРЭ) 1978 года введено новое понятие, которое в отечественной литературе [10] получило название «нормальная случайность». Под нормальной случайностью понимается событие, не предусмотренное при проектировании управления ЭС ГИ и стимулирующее развал ЭС ГИ при всех мероприятиях по улучшению устойчивости и ограничению потребителей.
Следуя методике, изложенной в [28], рассмотрим условия возникновения аварийных режимов ЭС ГИ, когда события развиваются в виде цепной реакции, приводящей к развалу ЭС ГИ, т. е. условия возникновения нормальной случайности. Механизм возникновения нормальной случайности проанализируем с привлечением понятия энтропийной устойчивости ЭС ГИ.
Решение поставленной задачи будет опираться на математическую и имитационную модели управления «угрожающим аварией» режимом, предложенную [76]. Математическая модель описывается линеаризованными уравнениями
![]() , (3.16)
, (3.16)
![]() , (3.17)
, (3.17)
где x – вектор отклонений переменных состояния от исходного установившегося состояния,
U – вектор отклонений управляющих воздействий (УВ), реализующих автоматическое регулирование возбуждения (АРВ) и автоматическое регулирование скорости вращения (АРС),
К – матрица коэффициентов передачи регулятора,
А, В – матрицы, в общем случае с переменными во времени коэффициентами, зависящими от исходного установившегося состояния.
Цель управления состоит в выборе УВ, которые минимизируют некоторый критерий качества
 , (3.18)
, (3.18)
где W,G – весовые матрицы.
Подставляя (3.17) в (3.16), получим
![]() . (3.19)
. (3.19)
При случайных начальных условиях возникновения аварийного режима компоненты вектора Х, являющиеся решением системы уравнений (3.19), будут случайными функциями времени. Поэтому в состоянии ЭС ГИ присутствует некоторая неопределённость (текущая энтропия), которая может развиваться как в сторону увеличения, так и в сторону уменьшения.
Дифференциальное уравнение эволюции текущей энтропии имеет вид [66]
![]() , (3.20)
, (3.20)
где Tr – след матрицы.
Формула (3.20) получена при анализе энтропийной устойчивости динамических систем. Из (3.20) видно, чтобы ЭС ГИ была энтропийно устойчива, необходимо и достаточно
Tr(A+BK)<0, (3.21)
в противном случае ЭС ГИ будет энтропийно неустойчивой.
ЭС ГИ, обладающая энтропийной устойчивостью, может быть неустойчивой по режиму. Поясним это утверждение на примере нерегулируемой энергосистемы с постоянными коэффициентами. В этом случае след матрицы равен сумме корней характеристического уравнения. Сумма корней характеристического уравнения может быть отрицательной, но некоторые корни или хотя бы один может быть положительным. Но это как раз и указывает на то, что при энтропийной устойчивости ЭС ГИ может быть неустойчивой по режиму.
Но если ЭС ГИ энтропийно неустойчива, то она обязательно будет неустойчивой по режиму. Для ЭС ГИ с постоянными коэффициентами этот вывод очевиден из указанного соотношения между следом матрицы и суммой корней характеристического уравнения, а для системы линеаризованных дифференциальных уравнений с переменными во времени коэффициентами это следует из выражения для определителя фундаментальной матрицы, формирующей систему решений [19]
 . (3.22)
. (3.22)
Пусть в результате случайного события в некоторый момент времени t0 произошло резкое изменение параметров ЭС ГИ или появились ошибочные управляющие воздействия, приведшие к тому, что
![]() , (3.23)
, (3.23)
и ЭС ГИ стала энтропийно неустойчивой.
Имеются три возможности, при которых (3.23) выполняется:
а) ![]() , но по абсолютной величине
, но по абсолютной величине ![]() ;
;
б) ![]() , однако по абсолютной величине
, однако по абсолютной величине ![]() ;
;
в) ![]() .
.
В ЭС ГИ при выполнении хотя бы одного условия («а», «б», «в») в момент времени t0 наступит энтропийная неустойчивость. Условия «а», «б», «в» и есть необходимые условия возникновения нормальной случайности.
Если рассматривать указанные условия как наступление соответственно событий «а», «б», «в», то можно заключить, что данные события неравновероятны. Событие «а» означает, в сущности, наступление динамической неустойчивости. Событие «б» означает неустойчивость информационных цепей управления. Событие «в» означает произведение событий «а» и «б». Из трех событий наиболее вероятно появление событий «б» и «а», наименее вероятно – события «в».
Если в момент времени t0 ЭС ГИ стала энтропийно неустойчивой, дальнейшее развитие событий зависит от того, удастся ли затормозить рост энтропии и стабилизировать работу ЭС ГИ, либо не удастся (рост энтропии станет безудержным, а ЭС ГИ останется энтропийно неустойчивой).
В развивающихся аварийных режимах, когда уже возникли необходимые условия для появления нормальной случайности, существенное значение имеет соотношение между скоростью нарастания энтропии и пропускной способностью каналов управления.
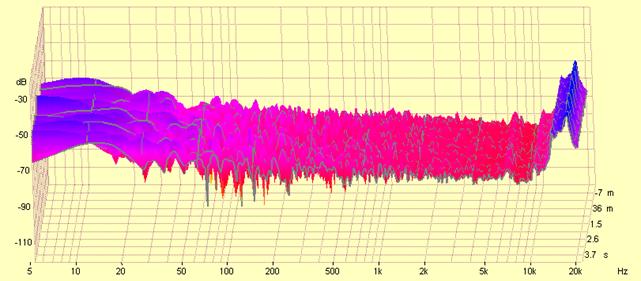
Рисунок 3.6 Критическая эволюция текущей энтропии, приводящая к каскадному развитию «угрожающего аварией» режима.
Если ![]() , то с помощью УВ удастся уменьшить рост энтропии за некоторое время (конечное) и энтропийная неустойчивость будет ликвидирована. Если же
, то с помощью УВ удастся уменьшить рост энтропии за некоторое время (конечное) и энтропийная неустойчивость будет ликвидирована. Если же  , то при любом управлении на множестве управляющих воздействий энтропийная неустойчивость не будет ликвидирована.
, то при любом управлении на множестве управляющих воздействий энтропийная неустойчивость не будет ликвидирована.
Условие ![]() является достаточным условием возникновения нормальной случайности. Из понятия энтропийной неустойчивости ЭС ГИ оказывается возможным дать оценку живучести ЭС ГИ. Если определить время T0, за которое скорость роста энтропии достигает величины пропускной способности каналов управления, то T0 будет характеризовать время, данное управлению для того, чтобы избежать безудержного нарастания энтропии ЭС ГИ. Образно говоря, на успешное управление аварийным режимом ЭС ГИ имеет времени не больше чем T0. Следовательно, время T0 характеризует живучесть и дает оценку живучести ЭС ГИ.
является достаточным условием возникновения нормальной случайности. Из понятия энтропийной неустойчивости ЭС ГИ оказывается возможным дать оценку живучести ЭС ГИ. Если определить время T0, за которое скорость роста энтропии достигает величины пропускной способности каналов управления, то T0 будет характеризовать время, данное управлению для того, чтобы избежать безудержного нарастания энтропии ЭС ГИ. Образно говоря, на успешное управление аварийным режимом ЭС ГИ имеет времени не больше чем T0. Следовательно, время T0 характеризует живучесть и дает оценку живучести ЭС ГИ.
Свойство ЭС ГИ противостоять крупным внутренним и внешним возмущениям, не допуская каскадного развития аварийных ситуаций, существенного снижения располагаемой мощности и отключения наиболее ответственных электроприёмников, характеризует понятие «живучесть ЭС ГИ».
Опираясь на результаты [28], предлагается оригинальная интерпретация понятия «живучесть ЭС ГИ», на основании которой и строится энтропийная модель живучести. Живучесть ЭС ГИ понимается как невозможность нарушить связность некоторой части ЭС ГИ, называемой ядром. Ядро – это совокупность питающих узлов (ПУ), линий связи (ЛС) и наиболее ответственных узлов нагрузки с такой структурой, которая позволит обеспечить питанием всю совокупность наиболее ответственных узлов нагрузки хотя бы одним ПУ из всей совокупности ПУ. До тех пор, пока не нарушена связность ядра, ЭС ГИ обладает живучестью и выполняет свое целевое назначение. В противном случае она прекратит свое существование как ЭС ГИ. Для создания некоторого запаса живучести ЭС ГИ повысим требование к структуре ядра: структура ядра, которая обеспечивает живучесть всей ЭС ГИ, должна оставаться неизменной.
Отсюда следует, поскольку живучесть ЭС ГИ непосредственно связана со структурой ядра, что задачу анализа живучести надо рассматривать как структурную оптимизацию ядра ЭС ГИ. Основываясь на результатах [51,67,75], можно сделать заключение:
1. Структура ядра должна обладать максимальной энтропией Нmax, другими словами, неизменность (связность) структуры ядра ЭС ГИ должна обеспечиваться минимальным количеством управляющей информации.
2. Скорость изменения энтропии Н должна быть минимальной.
В этом случае ядро описывается случайным графом, в котором с некоторой вероятностью допустимы связи между любыми его вершинами. Если удастся отыскать вероятность связности ядра ЭС ГИ в целом с учётом критериев структурной оптимизации, то тогда модель живучести ЭС ГИ будет построена и можно определить ряд количественных характеристик живучести. Ядро ЭС ГИ, представленное случайным графом G(![]() ,Г), где
,Г), где ![]() – множество ветвей ЛС, Г – число узлов, связно с вероятностью [69]
– множество ветвей ЛС, Г – число узлов, связно с вероятностью [69]

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
