


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Разлагая ![]() на простые множители
на простые множители ![]() , получим, что общее число арифметических операций равно
, получим, что общее число арифметических операций равно ![]() . Это намного меньше минимально возможного числа операций
. Это намного меньше минимально возможного числа операций ![]() для вычисления по формулам (4.20) без разбиения
для вычисления по формулам (4.20) без разбиения ![]() на множители. В частном случае
на множители. В частном случае ![]() , где
, где ![]() – целое число, количество операций равно
– целое число, количество операций равно ![]() . При этом выигрыш в числе операций, благодаря методу БПФ, составляет
. При этом выигрыш в числе операций, благодаря методу БПФ, составляет  . Он максимален при
. Он максимален при ![]() . Наибольшее количество алгоритмов БПФ составлено для случая
. Наибольшее количество алгоритмов БПФ составлено для случая ![]() .
.
Аналогичным образом можно произвести БПФ для периодических вещественных функций. В этом случае он становится несколько сложнее. Если большинство значений функций в узловых точках равны нулю, то можно ускорить БПФ с помощью исключения лишних операций. Мы рассмотрели только процедуру Фурье-анализа. Фурье-синтез (4.19) производится идентичным образом.
4.6. Продвижение частиц на очередном временном шаге
На каждом временном шаге моделирующие частицы продвигаются в соответствии с их уравнениями движения в самосогласованном поле:
 , (4.22)
, (4.22)
![]() ,
, ![]() . (4.23)
. (4.23)
Для численного решения уравнений (4.22), (4.23) в схемах PIC-моделирования обычно используется метод «с перешагиванием» [2, стр. 195]
 , (4.24)
, (4.24)
![]() . (4.25)
. (4.25)
Ее можно представить в виде схемы, изображенной на рисунке 4.5. Значения ![]() и
и ![]() вычисляются в точках
вычисляются в точках ![]() и
и ![]() путем перешагивания через предыдущие временные точки
путем перешагивания через предыдущие временные точки ![]() и
и ![]() . Шаги по времени для
. Шаги по времени для ![]() и
и ![]() смещены на величину
смещены на величину ![]() . Промежуточные значения одной из переменных используются для продвижения другой переменной на шаг
. Промежуточные значения одной из переменных используются для продвижения другой переменной на шаг ![]() .
.
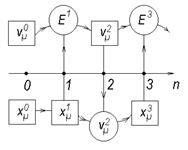
Рис. 4.5
Схема имеет второй порядок точности по ![]() , но содержит гораздо меньше вычислительных операций по сравнению с другими схемами такого порядка точности (например, с методом Рунге–Кутты). Этот факт является определяющим при ее выборе для использования в PIC-методе.
, но содержит гораздо меньше вычислительных операций по сравнению с другими схемами такого порядка точности (например, с методом Рунге–Кутты). Этот факт является определяющим при ее выборе для использования в PIC-методе.
Для выполнения первого шага приходится применять какой-либо другой метод, так как начальные значения ![]() ,
, ![]() заданы в один и тот же момент времени. Можно, например, найти координаты частиц в момент
заданы в один и тот же момент времени. Можно, например, найти координаты частиц в момент ![]() по методу Эйлера [2, стр. 45]
по методу Эйлера [2, стр. 45]
![]() .
.
Если с помощью значения ![]() применить метод Эйлера для вычисления
применить метод Эйлера для вычисления  , то процесс схемы с перешагиванием нужно начинать с этой точки.
, то процесс схемы с перешагиванием нужно начинать с этой точки.
4.7. Формирование начального распределения частиц на фазовой плоскости
Для начала вычислительного процесса в PIC-моделировании необходимо задать значения координат и скоростей всех частиц в соответствии с некоторым выбранным начальным распределением. Существуют два основных подхода к построению алгоритма формирования начального распределения [4, стр. 40].
1) Хаотический старт
Координаты ![]() и скорости
и скорости ![]() частиц задаются с использованием датчиков случайных чисел. В простейшем случае значения
частиц задаются с использованием датчиков случайных чисел. В простейшем случае значения ![]() соответствуют в среднем однородному распределению в интервале
соответствуют в среднем однородному распределению в интервале ![]() , а значения
, а значения ![]() формируют распределение, задаваемое некоторой функцией
формируют распределение, задаваемое некоторой функцией ![]() (например, максвелловской). Для этого можно использовать генератор случайных чисел, равномерно распределенных между 0 и 1. Следует задать
(например, максвелловской). Для этого можно использовать генератор случайных чисел, равномерно распределенных между 0 и 1. Следует задать ![]() как функцию
как функцию ![]() таким образом, что если
таким образом, что если ![]() определяется по формуле
определяется по формуле ![]() с помощью последовательности случайных чисел
с помощью последовательности случайных чисел ![]() , то скорости будут распределены согласно
, то скорости будут распределены согласно ![]() . Это означает, что
. Это означает, что
 ,
,  .
.
Если, например, ![]() является максвелловской функцией, то функция
является максвелловской функцией, то функция ![]() имеет вид, представленный на рисунке 4.6. Для каждого значения
имеет вид, представленный на рисунке 4.6. Для каждого значения ![]() путем решения уравнения
путем решения уравнения ![]() можно найти значение
можно найти значение ![]() . Эти значения будут распределены в соответствии с
. Эти значения будут распределены в соответствии с ![]() .
.
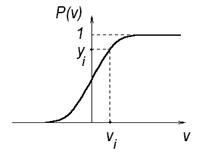
Рис. 4.6
Хаотический старт приводит к довольно сильному начальному шуму в распределении заряда и искажению равновесного спектра колебаний в длинноволновой области.
2) Спокойный старт
Этот метод обеспечивает подавление начальных шумов и длинноволновых флуктуаций, свойственных хаотическому старту. В нем распределение по скоростям строится для ![]() частиц в каждой ячейке одинаковым образом, то есть общее распределение состоит из
частиц в каждой ячейке одинаковым образом, то есть общее распределение состоит из ![]() пучков с различными скоростями. При этом все пучки являются пространственно однородными, что приводит к снижению начальных флуктуаций до уровня ошибок округления. Необходимый набор из
пучков с различными скоростями. При этом все пучки являются пространственно однородными, что приводит к снижению начальных флуктуаций до уровня ошибок округления. Необходимый набор из ![]() скоростей можно определить с помощью процедуры, представленной на рисунке 4.6, задавая в качестве
скоростей можно определить с помощью процедуры, представленной на рисунке 4.6, задавая в качестве ![]() значения функции
значения функции ![]() , равномерно распределенные в интервале (0, 1).
, равномерно распределенные в интервале (0, 1).
4.8. Формулы алгоритма PIC-метода в компьютерных переменных
Любая численная реализация физической задачи требует проведения удобного обезразмеривания. Пример такого обезразмеривания был рассмотрен в пункте 3.1 для случая численного решения уравнений Власова и Пуассона. Введение безразмерных переменных в PIC-алгоритмах преследует две цели. Во-первых, стандартное приведение вычисляемых физических величин к значениям с разумным порядком. Во-вторых, желательно получить уравнения для новых переменных с минимальным числом арифметических операций с целью сокращения расчетного времени.
Для моделирования плазменных колебаний удобно использовать следующий набор компьютерных переменных [2, стр. 198]:
![]() ,
, ![]() ,
, ![]() ,
,

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
