
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 , (6.15)
, (6.15)
де –![]() – перерізуюча сила в даному перерізі;
– перерізуюча сила в даному перерізі; ![]() – статичний момент відносно нейтральної осі відсіченої площі;
– статичний момент відносно нейтральної осі відсіченої площі; ![]() – осьовий момент інерції перерізу відносно нейтральної осі;
– осьовий момент інерції перерізу відносно нейтральної осі; ![]() – ширина перерізу.
– ширина перерізу.
Рис. 6. 5
У випадку прямокутника з висотою ![]() та шириною
та шириною ![]() (рис.10.5, б) момент інерції та статичний момент частини перерізу відносно нейтральної осі
(рис.10.5, б) момент інерції та статичний момент частини перерізу відносно нейтральної осі ![]() дорівнюють
дорівнюють
![]()
 (6.16)
(6.16)
Вираз (6.15) для дотичного напруження ![]() набуде вигляду
набуде вигляду
![]()
 . (6.17)
. (6.17)
Аналіз формули (6.17) показує, що максимальні дотичні напруження виникають на нейтральній осі балки і дорівнюють:
![]() . (6.18)
. (6.18)
Для круглого поперечного перерізу радіуса ![]() (Рис. 6.6) відповідні величини у формулі Журавського (6.15) будуть дорівнювати:
(Рис. 6.6) відповідні величини у формулі Журавського (6.15) будуть дорівнювати:

![]()
![]()

а кінцевий вираз для дотичного напруження ![]() має вигляд:
має вигляд:
 . (6.19)
. (6.19)
Рис. 6.6
З формули (6.16) легко отримати максимальне значення дотичного напруження в круглому перерізі, поклавши![]() :
:
![]() . (6.20)
. (6.20)
Порівняння формул (6.16)-(6.20) з відповідними результатами теорії пружності показує, що їх похибки не перевищують 5 %. Тому ці формули з достатньою точністю можуть бути застосовані у розрахунках балок на міцність.
6.4. Зігнута вісь балки та її диференціальне рівняння
Поперечні навантаження, що згинають балку, деформують її поздовжню вісь, перетворюючи її в деяку криву (Рис. 6.7). При розрахунках балок на жорсткість необхідно знати прогин у різних точках на осі балки, а максимальний прогин не повинен перевищувати допустимого.
Для того, щоб вивести диференціальне рівняння лінії прогинів балки (або пружної лінії), скористаємось залежністю (6.6) між кривиною i і згинальним моментом![]() . У цій рівності кривину пружної лінії можна наближено замінити другою похідною від прогинів балки
. У цій рівності кривину пружної лінії можна наближено замінити другою похідною від прогинів балки
![]() .
.
Похибка цього наближення еквівалентна величині ![]() у порівнянні з одиницею. В результаті, диференціальне рівняння зігнутої осі балки буде мати вигляд
у порівнянні з одиницею. В результаті, диференціальне рівняння зігнутої осі балки буде мати вигляд
![]() . (6.21)
. (6.21)
Якщо вісь ординат ![]() направлена вниз, то у рівнянні (6.21) перед величиною згинального моменту
направлена вниз, то у рівнянні (6.21) перед величиною згинального моменту ![]() необхід-но поставити знак “–”.
необхід-но поставити знак “–”.
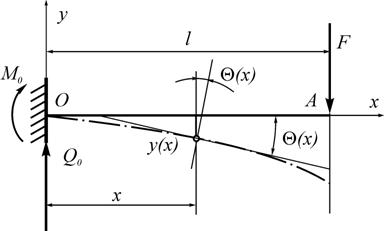
Рис. 6.7
У цьому випадку знаки згинального моменту ![]() та другої похідної
та другої похідної ![]() різні. Інтегруючи диференціальне рівняння (6.21), одержимо рівняння зігнутої осі балки у вигляді
різні. Інтегруючи диференціальне рівняння (6.21), одержимо рівняння зігнутої осі балки у вигляді
![]() , (6.22)
, (6.22)
де ![]() ;
;![]() .
.
Диференціюючи рівняння (6.22) за змінною![]() , одержуємо рівняння кутів повороту поперечних перерізів зігнутої осі балки
, одержуємо рівняння кутів повороту поперечних перерізів зігнутої осі балки
![]() . (6.23)
. (6.23)
Сталі інтегрування ![]() та
та ![]() мають, відповідно фізичний зміст прогину балки та кута повороту її перерізу в початку координатної системи. Їх прийнято називати ще початковими параметрами.
мають, відповідно фізичний зміст прогину балки та кута повороту її перерізу в початку координатної системи. Їх прийнято називати ще початковими параметрами.
Функція ![]() залежить від навантаження балки. У загальному випадку навантажень, які часто зустрічаються на практиці, її можна записати у вигляді
залежить від навантаження балки. У загальному випадку навантажень, які часто зустрічаються на практиці, її можна записати у вигляді
![]() , (6.24)
, (6.24)
де ![]() ,
, ![]() – відстані до точок прикладання зосереджених моментів
– відстані до точок прикладання зосереджених моментів ![]() та сил
та сил![]() ;
; ![]() – відстані до початку та кінця прикладання розподіленого навантаження
– відстані до початку та кінця прикладання розподіленого навантаження![]() .
.
У рівнянні (6.24) сила ![]() і момент
і момент ![]() діють у перерізі, який співпадає з початком координат. Знаки “+” чи “–” перед усіма величинами залежать від того, у якому напрямку буде переміщуватись від їх дії початок координат пружної лінії балки. Рівняння переміщень пружної лінії балки (6.22), куди входить функція навантажень у вигляді (6.24), називається універсальним рівнянням прогинів. Початкові параметри
діють у перерізі, який співпадає з початком координат. Знаки “+” чи “–” перед усіма величинами залежать від того, у якому напрямку буде переміщуватись від їх дії початок координат пружної лінії балки. Рівняння переміщень пружної лінії балки (6.22), куди входить функція навантажень у вигляді (6.24), називається універсальним рівнянням прогинів. Початкові параметри![]() ,
, ![]() ,
, ![]() та
та ![]() визначають з умов на опорах балки. Наприклад, для консолі (Рис. 6.6) буде:
визначають з умов на опорах балки. Наприклад, для консолі (Рис. 6.6) буде: ;
; ;
; ;
; . Тоді, виходячи із наведених даних, рівняння прогинів консолі матиме вигляд:
. Тоді, виходячи із наведених даних, рівняння прогинів консолі матиме вигляд:
![]() . (6.25)
. (6.25)
Диференціюючи цей вираз для прогинів, дістанемо рівняння кутів повороту поперечних перерізів консолі
![]() . (6.26)
. (6.26)
На вільному кінці консолі, при![]() , маємо:
, маємо:
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Знак “–” для переміщення ![]() означає, що воно відбувається у напрямку протилежному до додатного напрямку осі
означає, що воно відбувається у напрямку протилежному до додатного напрямку осі![]() .
.
Від’ємний знак кута ![]() вказує на те, що кінцевий переріз консолі повертається за ходом стрілки годинника.
вказує на те, що кінцевий переріз консолі повертається за ходом стрілки годинника.
Що стосується використання функції ![]() в універсальному рівнянні прогинів, то необхідно мати на увазі, що врахування кожного з членів у ньому відбувається за умов:
в універсальному рівнянні прогинів, то необхідно мати на увазі, що врахування кожного з членів у ньому відбувається за умов: .
.
Список використаної літератури
1. , І., Інженерна механіка. Частина І. Теоретична механіка. – Вінниця: Нова книга, 2006. – 504 с.
2. Збірник завдань для самостійної роботи та контролю знань студентів з теоретичної механіки. Кінематика і статика / та ін. – Краматорськ: ДДМА, 2004 –Ч.1.– 128с.
3. Павловський механіка. – К.: Техніка, 2002. –510 с
4. Теоретична механіка (Навчально-методичний посібник для студентів технічних спеціальностей). – ХНАМГ, 2007.
5. Теоретична механіка. Статика. Конспект лекцій (для студентів денної і заочної форм навчання бакалаврів) / За заг. ред. . – ХНАМГ, 2005.
6. Корнілов О. А. Опір матеріалів. – Київ: Лотос. 2000. – 551 с.
7. Опір матеріалів з основами теорії пружності й пластичності / за заг. ред. В. Т. Піскунова. У 2-х частинах, 5-ти книгах. – К.: Вища школа. 1994, 1995.
8. , Квітка О. Л., Опір матеріалів. – К.: Вища школа. 2004. – 655с.
9. Опір матеріалів. Підручник. Львів: Вид-во Львівського університету. 1973. – 404 с.
10. Тимошенко Дж. Механика материалов. Изд-во «Мир» (перевод с английского). 1976. – 670 с.
Теоретична та прикладна механіка [Текст]: конспект лекцій для студентів напряму підготовки 6.050403 – „Інженерне матеріалознавство” / уклад. , . – Луцьк: Луцький НТУ, 2016. – 84 с.
Комп’ютерний набір
Редактор
Підп. до друку 2016 р.
Формат 60х84/16. Папір офс. Гарнітура Таймс.
Ум. друк. арк. ___. Обл.-вид. арк. 2,5.
Тираж ____ прим. Зам. 1.
Редакційно-видавничий відділ
Луцького національного технічного університету
43018 м. Луцьк, вул. Львівська, 75
![]() Друк – РВВ Луцького НТУ
Друк – РВВ Луцького НТУ

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
