
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (16)
(16)
Теореми про еквівалентність пар сил
Теорема 1. Пари сил які лежать в одній площині, еквівалентні, якщо їх алгебраїчні моменти рівні, тобто̴̴̴̴̴̴̴̴̴
 , якщо
, якщо  .
.
Теорема 2 Пару сил, не змінюючи її дії на тверде тіло, можна переносити із однієї площини в іншу, яка паралельна даній площині.
Теорема 3 Пари сил еквівалентні, якщо їх векторні моменти рівні.
Із даних теорем випливають наступні властивості пар сил:
1) пару сил, не змінюючи її дії на тверде тіло, можна повертати і переносити довільним чином у площині її дії;
2) не змінюючи дії пари сил на тверде тіло, можна змінювати плече пари і сили пари, зберігаючи незмінним її алгебраїчний момент і площину дії;
3) не змінюючи дії пари сил на тверде тіло, її можна переносити у довільну площину, яка паралельна площині дії пари сил;
4) векторний момент пари сил - вільний вектор, який характеризується модулем і напрямком.
Дія пари сил на тверде тіло повністю характеризується її векторним моментом. Якщо відома площина дії пари сил, то на рисунку пару сил не зображають, а зображають колову стрілку, яка показує лише напрямок обертальної дії, і вказують інтенсивність повороту ![]() , тобто
, тобто

Рис. 20
1.11.Додавання пар сил
Теорема. Система пар сил, яка діє на тверде тіло еквівалентна одній парі сил, векторний момент якої дорівнює сумі векторних моментів пар сил, що додаються, тобто
![]() і
і ![]() (17)
(17)
Умови рівноваги тіла під дією системи пар сил
Теорема. Для того щоб вільне тверде тіло під дією системи пар сил знаходилось у рівновазі, необхідно і достатньо, щоб сума векторних моментів пар дорівнювала нулеві, тобто
 (18)
(18)
1.12.Зведення довільної системи сил до найпростішого вигляду
Теорема про паралельне перенесення сили
Теорема. Силу, прикладену до абсолютно твердого тіла, можна переносити паралельно самій собі у довільну точку тіла, не змінюючи її дії на це тіло, додаючи при цьому пару сил, векторний момент якої дорівнює моменту сили, що переноситься відносно нової точки прикладання.
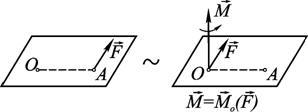
Рис. 21
![]() (19)
(19)
Головний вектор і головний момент системи сил
Головним вектором системи сил називається сила, яка дорівнює векторній сумі цих сил, тобто
 (20)
(20)
де ![]() - головний вектор системи сил
- головний вектор системи сил ![]() .
.
Головним моментом системи сил відносно точки ![]() називається сума векторних моментів цих сил відносно точки
називається сума векторних моментів цих сил відносно точки ![]() , тобто (рис. 22)
, тобто (рис. 22)
 (21)
(21)
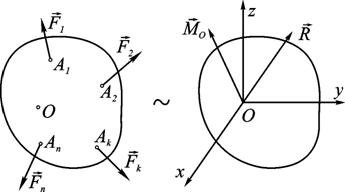
Рис. 22
Нехай ![]() ,
,
тоді
![]() (22)
(22)
 (23)
(23)
Нехай ![]() ,
,
тоді:
![]() (24)
(24)
 (25)
(25)
У випадку плоскої системи сил ![]()
![]()
 (26)
(26)
 (27)
(27)
 (28)
(28)
1.13.Основна теорема статики про зведення довільної системи сил до заданого центра (теорема Пуансо)
Теорема. Довільну систему сил, можна звести до сили, яка дорівнює головному вектору системи сил і до пари сил, векторний момент якої дорівнює головному моменту системи сил відносно центра зведення, тобто
![]() (29)
(29)
Центром зведення називається будь-яка точка до якої прикладається спрощена система сил.
Залежність головного вектора і головного момента системи сил від зміни центра зведення.
Теорема. Головний вектор системи сил не залежить від зміни центра зведення, тобто:  .
.
Теорема. Головний момент системи сил відносно нового центра зведення дорівнює сумі головного момента системи сил відносно старого центра зведення і векторного момента головного вектора, який прикладений у старому центрі зведення відносно нового центра зведення, тобто (рис. 23)
 або
або
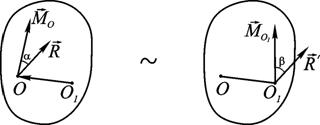
Рис. 23
1.14. Статистичні інваріанти системи сил відносно зміни центра зведення
Статистичним інваріантом системи сил відносно зміни центра зведення називається величина, яка не змінюється при зміні центра зведення.
Для довільної системи сил ![]() існує два статистичні інваріанти відносно зміни центра зведення.
існує два статистичні інваріанти відносно зміни центра зведення.
Перший статистичний інваріант системи сил.
 (30)
(30)
Другий статистичний інваріант.
Теорема. Скалярний добуток головного вектора і головного момента системи сил відносно довільного центра зведення є величина стала, тобто

Другим статистичним інваріантом є скалярний добуток головного вектора і головного момента відносно довільного центра зведення, тобто
 .
.
1.15.Часткові випадки зведення довільної просторової системи сил до найпростішого вигляду
Теорема. Якщо другий статистичний інваріант системи сил відмінний від нуля, то дана система сил зводиться до динами (динамічного гвинта).
Динамою (динамічним гвинтом) називається сукупність сили і пари сил, векторний момент якої напрямлений уздовж лінії дії сили, тобто (рис. 24)
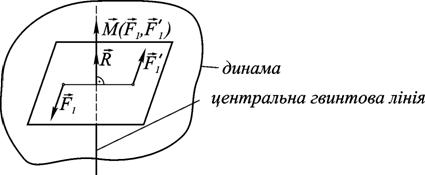
Рис. 24
Динаму можна звести до двох мимобіжних сил.
Якщо система сил зводиться до динами, то рівняння центральної гвинтової лінії у декартовій системі координат має вигляд:
![]() (31)
(31)
де  - головний вектор даної системи сил;
- головний вектор даної системи сил;
 - головний момент системи сил відносно центра
- головний момент системи сил відносно центра ![]() .
.
Теорема. Якщо другий статичний інваріант системи сил дорівнює нулеві, то дана система сил може зводитись до рівнодійної або до пари сил, або взаємно зрівноважуватись
Для плоскої системи сил другий статичний інваріант дорівнює нулеві, то плоска система сил може зводитись до рівнодійної або до пари сил, або взаємно зрівноважуватись.
1.16.Умови рівноваги тіла під дією довільної просторової
cистеми сил (друга основна задача статики)
Умови рівноваги тіла під дією довільної просторової системи сил в геометричній формі.
Теорема. Для того щоб вільне тверде тіло під дією довільної просторової системи сил знаходилось у рівновазі, необхідно і достатньо, щоб головний вектор і головний момент цієї системи сил відносно довільної точки дорівнювали нулеві, тобто:
 (32)
(32)
Умови рівноваги тіла під дією довільної просторової системи сил в аналітичній формі.
Теорема. Для того щоб вільне тверде тіло під дією довільної просторової системи сил знаходилось у рівновазі, необхідно і достатньо, щоб суми проекцій усіх сил на координатні осі х, у, z, і суми моментів сил відносно цих координатних осей дорівнювали нулеві, тобто:
![]()
![]()
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
