
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.8.2.Умови рівноваги тіла в аналітичній формі.
Теорема. Для того щоб вільне тверде тіло під дією збіжної системи сил знаходилось у рівновазі, необхідно і достатньо, щоб суми проекцій усіх сил на координатні осі ![]() дорівнювали нулеві, тобто
дорівнювали нулеві, тобто
 (7)
(7)
Для плоскої системи сил маємо:
 (8)
(8)
Теорема про рівновагу трьох непаралельних сил (теорема про три сили).
Теорема. Якщо під дією трьох непаралельних сил вільне тверде тіло знаходиться у рівновазі і лінії дії двох сил перетинаються, то усі три сили лежать в одній площині і їх лінії дії перетинаються в одній точці.
Момент сили відносно точки та осі і залежність між ними
Векторним моментом сили відносно точки називається векторний добуток радіуса-вектора проведеного із точки відносно якої обчислюється момент на вектор сили, тобто (рис. 14)
![]() (9)
(9)
Плечем сили відносно точки називається довжина перпендикуляра, опущеного із точки відносно якої обчислюється момент на лінію дії сили.
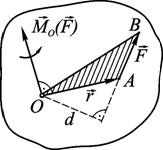
Рис. 14
Або іншими словами можна сказати: векторним моментом сили відносно точки називається вектор модуль якого дорівнює добутку модуля сили на плече. Цей вектор перпендикулярний до площини у якій лежать вектор сили і точка відносно якої обчислюється момент і напрямлений у такий бік, якщо дивитися з його кінця, то видно намагання сили повернути тіло проти ходу стрілки годинника.
Властивості векторного момента сили відносно точки
1) векторний момент сили відносно точки не змінюється при переносі точки прикладання сили уздовж її лінії дії;
2) векторний момент сили відносно точки дорівнює нулеві, якщо лінія дії сили проходить через точку, відносно якої обчислюється момент (плече дорівнює нулеві).
Якщо розглядається плоска система сил то вводиться поняття алгебраїчного момента сили відносно точки.
Алгебраїчним моментом сили відносно точки називається взятий з відповідним знаком добуток модуля сили на плече. Знак плюс береться у тому випадку якщо сила намагається повернути тіло відносно даної точки проти ходу стрілки годинника (рис. 15).
![]()

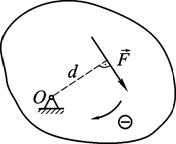
Рис. 15
1.8.3.Момент сили відносно осі
Моментом сили відносно осі називається алгебраїчний момент проекції цієї сили на площину, яка перпендикулярна до осі, відносно точки перетину даної осі з цією площиною, тобто
![]() ,
,
де ![]() прп
прп![]() проекція сили на площину
проекція сили на площину ![]() .
.
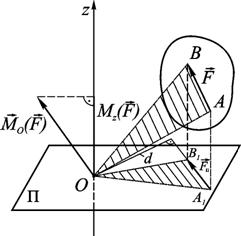
Рис. 16
Для того, щоб обчислити момент сили ![]() відносно осі
відносно осі ![]() , необхідно:
, необхідно:
1) спроектувати силу ![]() на площину
на площину ![]() , яка перпендикулярна до осі
, яка перпендикулярна до осі ![]() .
.
2) Встановити точку перетину площини П з віссю ![]() (точка О).
(точка О).
3) У площині ![]() обчислити алгебраїчний момент сили
обчислити алгебраїчний момент сили ![]() відносно точки
відносно точки ![]() . Одержаний результат і буде моментом сили
. Одержаний результат і буде моментом сили ![]() відносно осі
відносно осі ![]() .
.
Момент сили відносно осі дорівнює нулеві, якщо сила і вісь лежать в одній площині.
Залежність між векторним моментами сили відносно точки і моментом сили відносно осі, яка проходить через дану точку.
Теорема. Момент сили відносно осі дорівнює проекції на цю вісь векторного момента сили відносно довільної точки, яка лежить на цій осі.
Друге означення момента сили відносно осі.
Моментом сили відносно осі називається проекція на цю вісь векторного момента сили відносно будь-якої точки, яка лежить на цій осі, тобто
![]() прz
прz (10)
(10)
Аналітичні формули для обчислення моментів сили відносно трьох координатних осей.
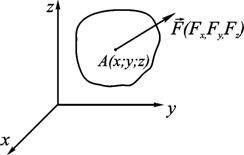
Рис. 17
Якщо вектор сили ![]() заданий своїми координатами
заданий своїми координатами ![]() і задано координати точки
і задано координати точки  прикладання сили
прикладання сили ![]() , тоді мають місце залежності:
, тоді мають місце залежності:
 (11)
(11)
1.9.Теорія пар сил
1.9.1.Додавання паралельних сил
Теорема. Дві паралельні сили зводяться до рівнодійної, модуль якої дорівнює сумі модулів складових сил, якщо сили напрямлені в один бік, і різниці модулів, якщо модулі цих сил не рівні між собою і напрямлені у протилежні боки, тобто
![]() .
.
Лінія дії рівнодійної ділить відстань між лініями дії заданих сил відповідно внутрішнім і зовнішнім чином на частини, які обернено пропорційні до модулів складових сил,  .
.
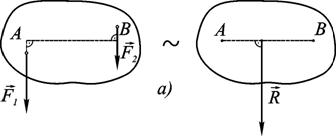
Рис. 18
 ; (12)
; (12)
 (13)
(13)
![]()
 ; (14)
; (14)
Система двох паралельних сил, які напрямлені у різні боки і рівні за модулем ![]() немає рівнодійної, тобто її неможливо зрівноважити однією силою. Така система двох сил розглядається як окремий силовий фактор, який називається парою сил.
немає рівнодійної, тобто її неможливо зрівноважити однією силою. Така система двох сил розглядається як окремий силовий фактор, який називається парою сил.
Парою сил називається сукупність двох сил, які рівні за модулем, протилежні за напрямком, лінії дії яких не співпадають (збігаються).
Пару сил будемо позначати наступним чином:  , де
, де 
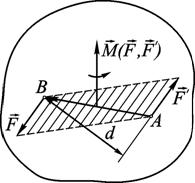
Рис. 19
Площиною дії пари сил називається площина, у якій лежать сили пари.
Плечем пари сил називається відстань між лініями дії сил пари.
Для характеристики дії пари сил на тверде тіло вводиться поняття момента пари сил.
1.10.Векторний та алгебраїчний момент пари сил
Векторним моментом пари сил називається векторний добуток радіуса-вектора, що з’єднує точку прикладання першої сили пари з точкою прикладання другої сили на вектор другої сили.
![]() .
.
Векторним моментом пари сил називається вектор, модуль якого дорівнює добутку модуля однієї із сил пари на плече пари сил. Цей вектор напрямлений перпендикулярно до площини дії пари сил у бік, звідки видно намагання пари сил повернути тіло проти ходу стрілки годинника.
Теорема. Векторний момент пари сил дорівнює сумі векторних моментів сил пари відносно довільної точки простору ![]() , тобто
, тобто
![]() (15)
(15)
Алгебраїчним моментом пари сил називається взятий з відповідним знаком добуток модуля однієї із сил пари на її плече. Знак плюс береться у тому випадку, коли пара сил намагається повернути тіло проти ходу стрілки годинника:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
