


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
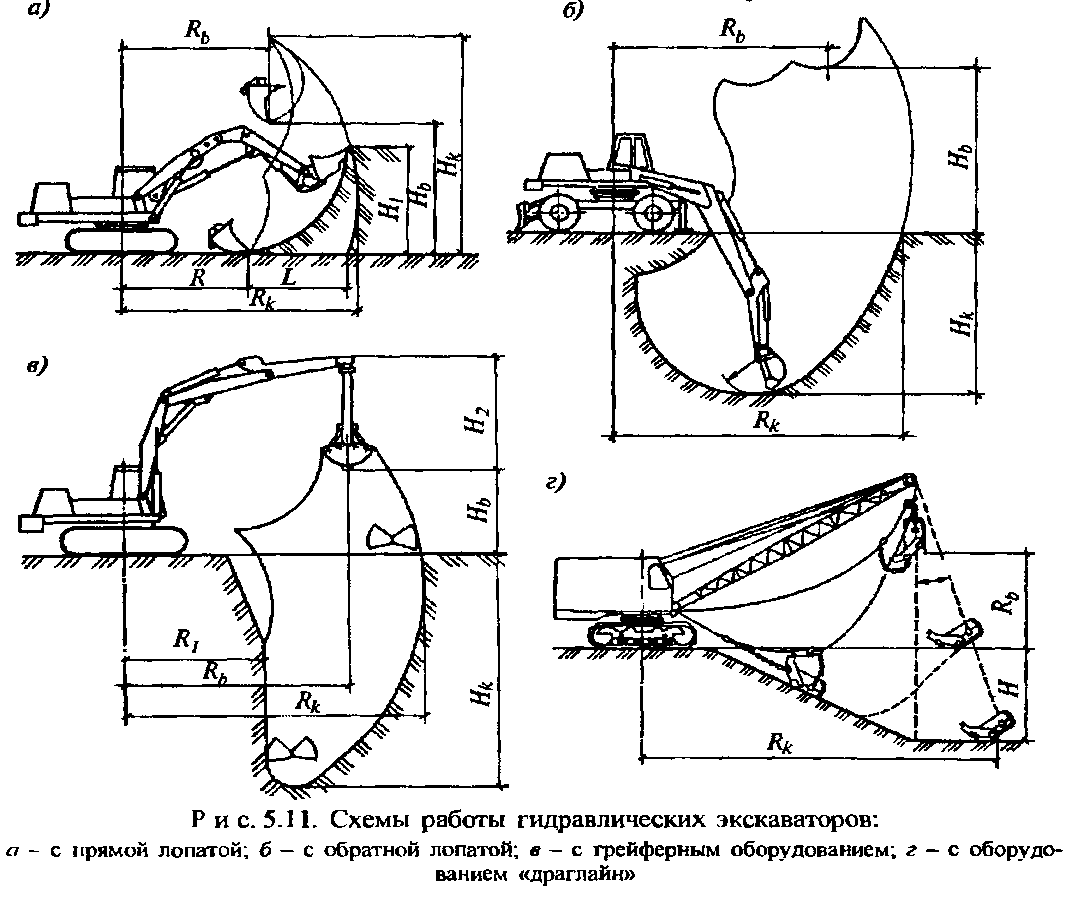
Рисунок 3.8 – Определение основных характеристик экскаваторов с гидравлическим приводом: а – с прямой лопатой; б – с обратной лопатой;
в – с грейферным оборудованием; г – с оборудованием типа «драглайн».
Основные технические характеристики экскаваторов основываются прежде всего на определении параметров земляного объекта строительства, объема земляных работ и сравнении полученных данных с нормативными характеристиками машин приведенных в таблицах приложений.
Производительность экскаватора и других землеройных и землеройно-транспортных машин определяется по формуле:
| (3.18) |
где: Т, Тц – соответственно время работы машины, время цикла экскавации; q – геометрическая вместимость ковша (земляной призмы); Кн, Кр, Кв – соответственно коэффициенты наполнения ковша, разрыхления грунта, использования времени в течение смены.
Работа при максимальных вылетах стрелы (Rтах) приводит к быстрому износу машины, поэтому принимаются оптимальные рабочие параметры (R0), составляющие 90% показанных на рисунке 5.7 максимальных значений:
Ro = 0.9 | (3.19) |
Экскаватор с прямой лопатой (рисунок 3.9, а) в основном используется при разработке выемок в сухих и маловлажных грунтах, что связано с необходимостью съезда на дно выемки. Применяют продольные лобовые (рисунок 3.9, б-г) или боковые (рис. 5.14, д) проходки с погрузкой грунта в транспортное средство, которое обычно размещают непосредственно в забое. Для выезда и въезда транспорта устраивают наклонные пандусы с уклоном 10... 15°.Нормальная ширина лобовой проходки В (рисунок 3.9 в) определяется по формуле:
| (3.20) |
 ,
,где: R0 – оптимальный радиус резания; Ln – длина передвижки, т. е. расстояние, на которое передвигается экскаватор после разработки грунта с предыдущей стоянки.
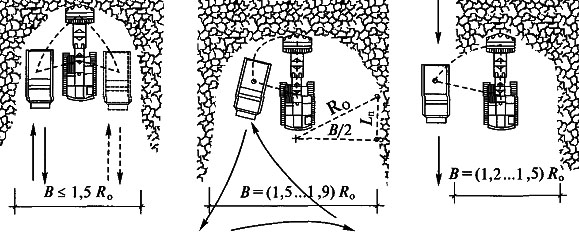
Наряду с проходками нормальной ширины (1,5 - 1,9)![]()
![]() R0 из-за условий работы могут применяться узкие проходки (до 1,5 R0) и уширенные проходки (2... 2,5)
R0 из-за условий работы могут применяться узкие проходки (до 1,5 R0) и уширенные проходки (2... 2,5)![]()
![]() R0. В зависимости от ширины проходки лобовые забои подразделяются на узкие, нормальные и уширенные. Из-за большого угла поворота стрелы производительность экскаватора, работающего в узком забое, бывает ниже, чем при работе в нормальных и уширенных забоях.
R0. В зависимости от ширины проходки лобовые забои подразделяются на узкие, нормальные и уширенные. Из-за большого угла поворота стрелы производительность экскаватора, работающего в узком забое, бывает ниже, чем при работе в нормальных и уширенных забоях.
При боковой проходке (рисунок 3.9, д) транспорт подается под погрузку сбоку выработки, что уменьшает угол поворота стрелы экскаватора и способствует повышению его производительности.

а) г)
б) в) д)
Рисунок 3.9 – Схемы разработки выемок экскаватором «прямая лопата»:
а – общий вид; б, в, г – лобовые проходки: соответственно узкая, нормальной ширины и уширенная; д – боковая проходка.
Экскаваторы, оборудованные обратной лопатой, разрабатывают выемки торцевыми (лобовыми) и боковыми проходками (рисунок 3.10), располагаясь выше дна забоя, что позволяет использовать их при разработке увлажненных и мокрых грунтов, с погрузкой в транспортное средство или в отвал.
Транспорт может подаваться по дну выемки или поверху с одной или двух сторон. Глубина забоя определяется длиной рукояти экскаватора. Ширина торцевой проходки при двухсторонней погрузке самосвалов (1,6... 1,7)![]()
![]() R0, при односторонней – (1,2... 1,5)
R0, при односторонней – (1,2... 1,5)![]()
![]() R0. При работе в отвал ширина проходки бывает меньше – (0,5 ...0,8)
R0. При работе в отвал ширина проходки бывает меньше – (0,5 ...0,8)![]()
![]() R0 При боковой проходке автотранспорт под погрузку может подаваться по верху или по дну котлована, с правой или левой стороны (рисунок 3.10,б).
R0 При боковой проходке автотранспорт под погрузку может подаваться по верху или по дну котлована, с правой или левой стороны (рисунок 3.10,б).

а) б)
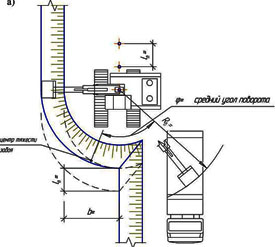
Рисунок 3.10 – Схема бокового забоя экскаватора - обратная лопата:
а – план; б – поперечный разрез

а) б)
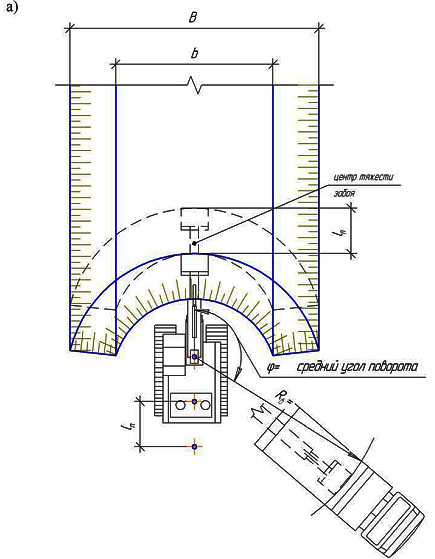
Рисунок 3.11 – Схема лобового забоя экскаватора– обратная лопата:
а – план; б – продольный разрез
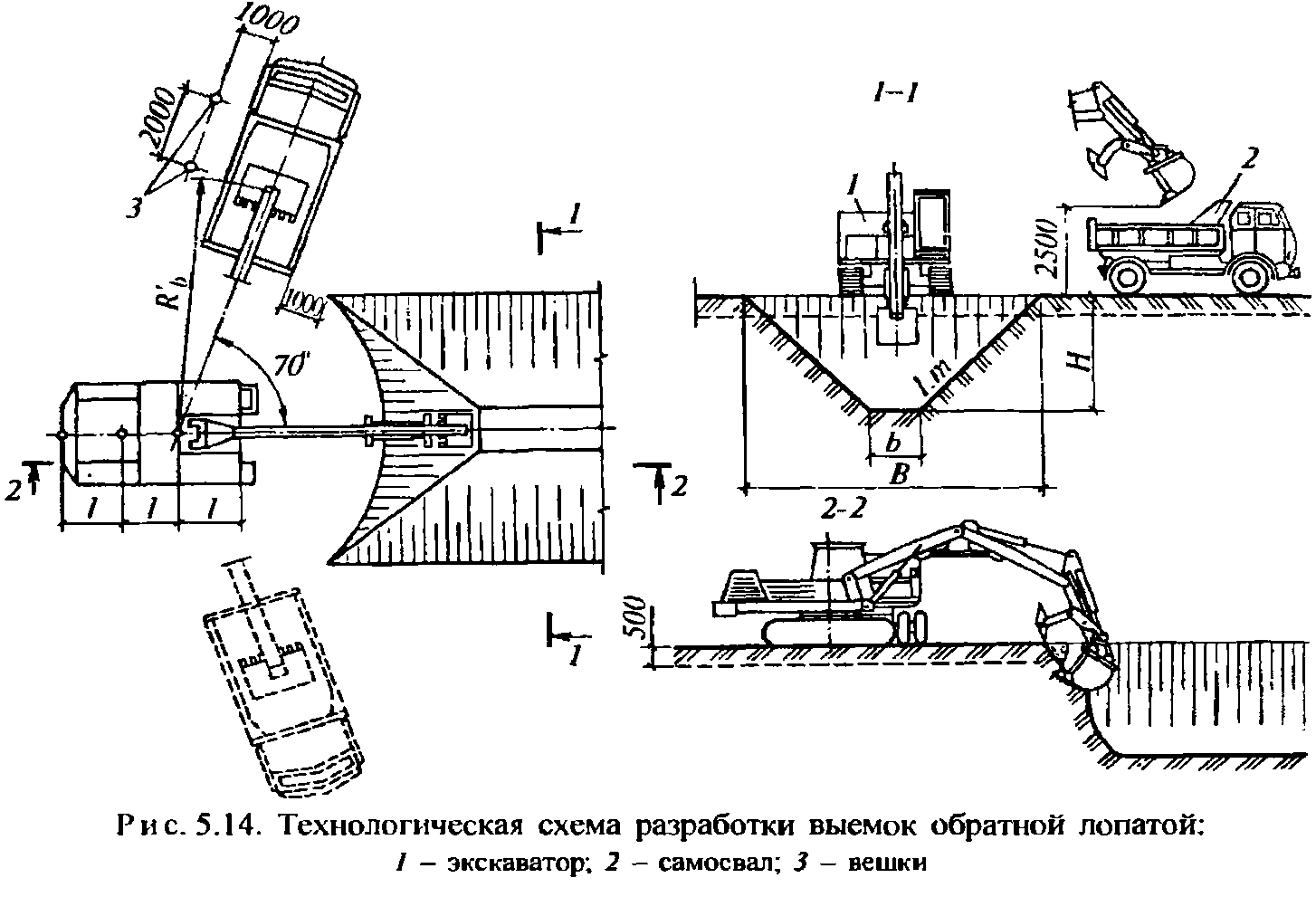
Рисунок 3.12 – Технологическая схема разработки выемок обратной лопатой:
1 – экскаватор; 2 – самосвал; 3 – вешки
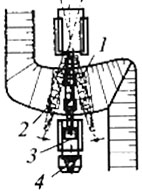
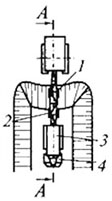
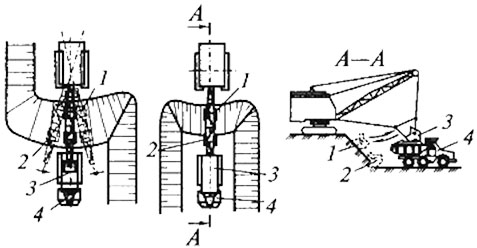
Экскаваторы с грейферным ковшом применяют при разработке узких или глубоких выемок (траншей, колодцев) в мягких и сыпучих грунтах, в том числе при высоком уровне грунтовых вод. Ковш может быть установлен на рукояти или подвешен на решетчатой стреле, грунт набирается с использованием гидравлического привода или врезания в грунт тяжелого ковша (рисунок 3.13).
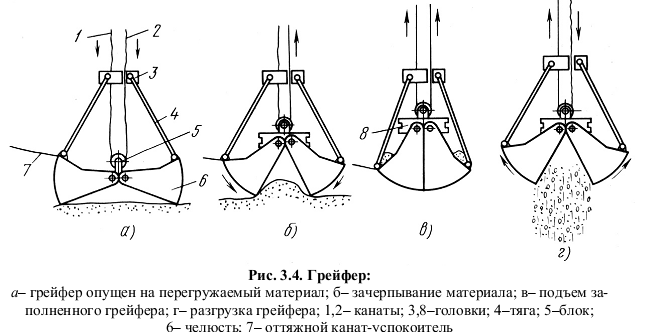
Рисунок 3.13 – Грейферный ковш:
а – грейфер опущен на грунт; б – захват грунта; в – подъем заполненного грунтом грейфера; г – разгрузка грейфера; 1,2 – канаты; 3, 8 – головки; 4 – тяга; 5 – блок; 6 – челюсть; 7 – оттяжной канат-успокоитель
Гидравлическая система привода позволяет разрабатывать плотные грунты легкими ковшами, что дает возможность за один цикл экскавации набирать в ковш больше грунта. Производительность экскаваторов с таким оборудованием значительно повышается.
Драглайн (рисунок 3.14) применяют при разработке грунта ниже уровня стоянки экскаватора, без съезда на дно выемки, поэтому наличие грунтовых вод не влияет на работу машины.
Драглайн используют для рытья сравнительно больших котлованов и траншей, а также для отсыпки насыпей, в частности на строительстве каналов, автомобильных и железных дорог.
При применении драглайна выемку грунта можно осуществлять лобовыми или боковыми проходками. Поскольку ковш подвешен на канате, то при загрузке он раскачивается и забрасывается на расстояние радиус забоя Л3, превышающее длину стрелы; часто используют челночные способы работы (рисунок 3.14 а, б).
При поперечно-челночном способе самосвал загружается попеременным черпанием ковша с обеих сторон кузова. При про - дольно-челночном грунт набирается перед задним бортом кузова самосвала. Угол поворота стрелы экскаватора при погрузке по продольно-челночной схеме приближается к 0, а при поперечно - челночной — к 15...20°. Во время разгрузки движение ковша не прекращается, благодаря чему продолжительность цикла экскавации снижается на 20...26%.
а) б) в)
Рисунок 3.14– Разработка грунта экскаватором драглайн способами:
а – поперечно-челночным; б, в – продольно-челночным
1 – подъем ковша; 2- опускание ковша при наборе грунта; 3 – разгрузка ковша; 4 - автосамосвал
Экскаваторы с телескопической стрелой (рисунок 3.15) работают так же, как экскаваторы, оборудованные обратной лопатой. Однако кроме обычных экскавационных работ с помощью этого оборудования можно выполнять зачистные и планировочные работы, что является преимуществом при разработке мелких рассредоточенных земляных сооружений. Для увеличения скорости передвижения с объекта на объект существуют экскаваторы на пневмоходу. Механизм втягивания стрелы у них приспособлен для копания грунта, планировки и зачистки поверхностей, погрузки сыпучих материалов и штучных грузов.
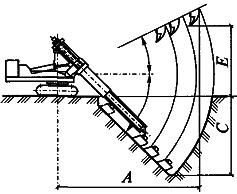
Рисунок 3.15 – Разработка грунта экскаватором с телескопической стрелой способом «на себя»
Погрузчики на гусеничном и пневмоколесном ходу (рисунок 3.1б), как и прямая лопата, работают выше уровня стоянки машины движением ковша от себя. Вместимость ковша погрузчика в 1,5...2 раза больше вместимости ковша прямой лопаты, что позволяет существенно повысить производительность экскаватора. Движение режущей кромки отвала по прямолинейной горизонтальной траектории позволяет планировать площадку, на которой работает машина. Благодаря возможности перемещения грунта на небольшие расстояния работа одноковшовых погрузчиков бывает особо эффективной в стесненных условиях. Ковш наполняется ступенчатым, экскавационным, раздельным и совмещенным способами (рисунок 3.15).
У экскаваторов непрерывного действия все операции по разработке грунта выполняются одновременно и непрерывно. По типу рабочего органа экскаваторы подразделяют на цепные многоковшовые и скребковые, роторные многоковшовые и бесковшовые. По характеру движения рабочего органа экскаваторы делятся на экскаваторы продольного, поперечного и радиального копания. У первых направление движения рабочего органа (ротора, ковшовой цепи) совпадает с направлением движения машины. У вторых оно перпендикулярно направлению движения машины. У третьих рабочие органы поворачиваются относительно базы машины (роторные стреловые экскаваторы).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |
