

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Задачи создания микроманипулятора определяют основные свойства его конструкции:
1. Размер модуля – не более 100 нм.
2. Память – не менее 10 кб.
3. Защитная оболочка – имеется у каждого элемента и связи.
4. Процессор с генерированием управляющей частоты в диапазоне – от 0 до 10 кГц.
5. Температурный режим эксплуатации – от 00 С до 1000 С.
6. Источник энергии – от 10 до 12 кДж.
7. Функции:
- создание условий для контроля параметров объектов;
- выполнение функций измерения;
- частота приемистости – от 0 до 10 кГц;
- перемещения - линейное, угловое, смешанное;
- диапазоны регулирования скоростей перемещений:
а) в линейном радиальном направлении – от 0 до 40 мм/мин.;
б) в поперечном (угловом) направлении – от 0 до 650 град./c;
- дискретность перемещения:
а) радиального линейного – радиус равносторонней шестиугольного рамки модуля конструкции деленный на ![]() ;
;
б) углового поперечного – от 10 до 600 в пропорциональном соотношении с суммарным углом поворота в 3600;
- исполнение функций самостоятельное или по программе извне,
- функционирование в закрытых полостях и каналах;
- движение в жидкостях,
- транспортировка и управляемое высвобождение лекарств,
- проникновение внутрь биологических клеток;
- заполнение сферических емкостей конструкции отработанной биомассой клетки и ее транспортировка;
- способность к структурному развитию через кинематическое и функциональное объединение с тождественными нанороботами как модулями, а также выход из модульных структур в автономное исполнение функций;
- способность к саморазрушению в биологическом объекте при отсутствии негативных последствий для последнего.
Вариант микроманипулятора в данной технической интерпретации показывается без отражения специфики применяемых в его конструкции материалов. Описывается лишь схемотехническая реализация конструкции. С учетом характеристик сопутствующих материалов преимущества микроманипулятора, несомненно, повышаются. При этом, по окончании заданного цикла работы, микроманипулятор сможет разрушиться в объекте и, без последствий для последнего, быть выведен наружу.
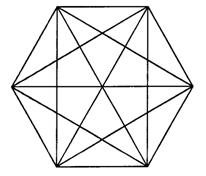
Принцип структурного развития микроманипулятора представляется таким образом. Его конструкция формируется из идентичных модулей. Модуль основан на рамке, профиль которой тождественен равностороннему шестиугольнику (рис.10). Шестиугольник оснащен связями, проходящими через его вершины таким образом, что образуется многосвязная структура. В ней каждая вершина соединена с каждой из числа имеющихся в структуре, что упрощает процедуры обмена информацией между вершинами.
| |
| |
 |
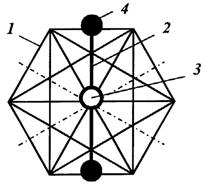
В центре шестиугольной рамки 1 на базирующем стрежне 2, расположенном вертикально, устанавливается (рис.11) узловой полый сферический элемент 3. На свободных концах стержня 2, выполненного с цилиндрической образующей и полым, также установлены полые сферические элементы 4, причем данные элементы и несут рамку 1 с профилем, тождественным равностороннему шестиугольнику, а связь элементов 4 с рамкой 1 осуществлена через середины параллельных сторон шестиугольников, при этом вершины и середины сторон остальных сторон шестиугольной рамки также оснащены полыми сферическими элементами, связанными с центральным сферическим элементом базирующего стержня посредством самостоятельных полых цилиндрических стержней (рис.12а). Каждый элемент 4 (рис.11) несет один бит информации. Поэтому элементы 4 становятся управляемыми. Узловой элемент 3 (рис.11) предназначен для размещения в нем энергосистемы, блока управления и генератора тактовых импульсов. Во всех элементах, помимо базового, и в связях между ними допускается располагать требуемое количество лекарственных препаратов или информационных указателей. Организуется также исполнение обратной функции: заполнение полых элементов биомассой, отработанной биологической клеткой.
|
|
Далее каждая сторона шестиугольной рамки дополняется управляемыми полыми сферическими элементами (рис.12б). Количество сферических элементов устанавливается согласно вводимым исходным данным на объем информации в нанороботе, что рассчитывается ниже.
а б
Рисунок 13 - Способ объединения модулей в микроманипуляторе без
узловых сферических опор (а) и с ними (б)
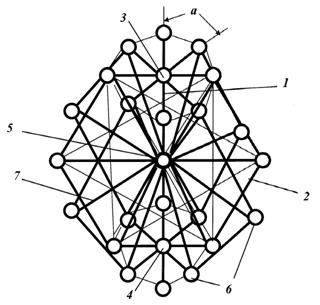
Микроманипулятор состоит (рис.13б) из базового стрежня 1, длина которого равна диаметру d вписанной в равносторонний шестиугольник, образующий рамку 2, окружности. Стержень 1 выполнен полым с внутренней и наружной цилиндрическими образующими. На свободных концах опорного стержня 1 имеются полые сферические элементы 3, и 4, а в его центре (d/2) установлена дополнительная полая сферическая опора 5. При этом вершины и середины сторон остальных шестиугольных рамок 2 также оснащены полыми сферическими элементами 6, которые соединены с дополнительной центральной сферической опорой 5 базового стержня 1 конструкции посредством самостоятельных полых цилиндрических стержней 7.
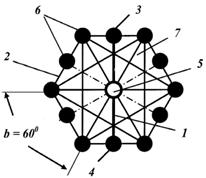
В элементах 3 и 4 стрежня 1 смонтированы (рис.14а) радиально расположенные и смещенные друг относительно друга на шаговый угол b шестиугольные рамки 7 как пластины. Сферические элементы 3 и 4 стержня 1 микроманипулятора связаны с центрами (d/4) параллельных сторон 2 каждой шестиугольной рамки 7 посредством центрального сферического элемента 5. Узловые сферические элементы 6 дополняют конструкцию. Количество q рамок 2 (рис.14б) зависит от необходимой дискретности управления, задаваемой шаговым углом а. Так, при α = 10, n = 360, а при α = 600, n = 6 и т. д. Каждая рамка 2 также выполнена полой? имеет внутреннюю и наружную цилиндрические образующие, связана с центральным сферическим элементом 3.
| |
| |

 |
Стороны всех рамок 1 и 2 дополнены полыми сферическими элементами 3, которые размещены между центральным 4 и крайним 5 сферическими элементами таким образом, что элементы соседних сторон шестиугольников рамок 1 и 2 смещены в противоположных направлениях относительно центрального элемента 4 на шаг у исходной рамки 1 и на половину шага у соседней с ней рамки 2 (рис.15). При этом дополнительные сферические элементы 3 сообщены друг с другом и с центральным сферической опорой 4 посредством идентичных полых цилиндрических стержней 6.
Размещение сферических элементов 3 на соседних сторонах шестиугольных рамок 1 и 2, выполненное со сдвигом шага их относительного расположения и не приводит к их соприкосновению друг с другом.
Общее количество сферических элементов N устанавливается согласно вводимым исходным данным на объем информации в конструкции. Для обеспечения требуемой информационной емкости, например в 10 кб задается степень заполнения шестиугольной рамки сферическими элементами. Алгоритм расчета количества необходимых сферических элементов в конструкции следующий: 10 кб → 10240 байта → 81920 бит → N ≈ 228 элементов в одной рамке. Необходимая конструкторская коррекция приводит к результату N = 264. Тогда при наличии шести элементов в вершинах рамки на каждую ее сторону добавляется еще 43 сферических элемента, что в комплексе приводит к 45 элементам на стороне. Далее, в 360 шестиугольных рамках 2, входящих в конструкцию с шаговых углом α = 10, присутствует 95049 сферических элементов и емкость памяти при этом составляет 11,220 кб.
|
Процесс работы микроманипулятора протекает следующим образом. Автономный генератор импульсов сферической опоры 5 (рис.13б) формирует серии импульсов в частотном диапазоне от 0 до заданного максимального значения fзад (например, 10 кГц), а блок управления распределяет их по поляризуемым сферическим элементам 3,4,6,8 сторон шестиугольных рамок 2 через полые цилиндрические стержни 1 и 7. Распределение импульсов подачи полярного импульса и его снятие со сферических элементов определено целью исполнения движения микроманипулятора и его направленности. При этом возможны следующие целевые перемещения микроманипулятора в пространстве:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
