

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1) прямолинейный ход в любом (прямом или обратном) радиальном направлении с параметром скорости v, задаваемым шаговым углом b и генерируемой частотой импульсов в диапазоне от 0 до fзад. Скорость v данного прямолинейного перемещения равна v = df/2, поскольку за один управляющий импульс микроманипулятор перемещается на шаговый угол b или расстояние d/2. Тогда при d = 100 нм, f = 10 кГц, v = 30 мм/мин.
Смена направления прямолинейного движения осуществляется переключением по командам от блока управления подачи импульсов от того же генератора на любую, необходимую для реализации этого направления, рамку 2. Последние смещены радиально друг от друга и относительно оси базового стержня 1 на шаговый угол α, что и устанавливает новый вектор скорости v прямолинейного перемещения конструкции. Возможная скорость vп изменения направления прямолинейного перемещения есть vп = α fзад и при диапазонах изменения шагового угла 10 ≤ α ≤ 600, а также частоты приемистости 0 ≤ fзад ≤ 10 кГц равна, соответственно, 0…10 град./c и 0…600 град./c;
2) криволинейный ход по дуге окружности радиуса ![]() . Он выполняется в случае исполнения управления каждой стороной шестиугольной рамки, разнесенных на шаговый угол α. Переход на движение по новым сторонам шестиугольных рамок 2 приводит к переносу центра криволинейного хода симметрично относительно точки пересечения двух смежных сторон шестиугольной рамки 2 микроманипулятора. При этом имеют место симметричные траектории криволинейных движений микроманипулятора. Скорость криволинейного хода не отличается от скорости vп изменения направления прямолинейного перемещения.
. Он выполняется в случае исполнения управления каждой стороной шестиугольной рамки, разнесенных на шаговый угол α. Переход на движение по новым сторонам шестиугольных рамок 2 приводит к переносу центра криволинейного хода симметрично относительно точки пересечения двух смежных сторон шестиугольной рамки 2 микроманипулятора. При этом имеют место симметричные траектории криволинейных движений микроманипулятора. Скорость криволинейного хода не отличается от скорости vп изменения направления прямолинейного перемещения.
В итоге образована конструкция микроманипулятора, внешний габарит которого приближается к сфере. Подобное исполнение придает конструкции микроманипулятора независимость положения относительно транспортного пути, возможность смены направлений перемещения, развития конструкции в направлениях, определяемых планом его действий, повышение мобильности и быстродействия, упрощение управления и конструктивного
исполнения в целом.
Модули микроманипулятора информационно и энергетически связаны через единый центр, и их пространственная ориентация задается шаговыми углами α и b (рис.16) при выполнении последовательных угловых смещений текущего модуля относительно предыдущего вокруг оси конструкции в продольном и поперечном направлениях.
|

|
|
Микроманипулятор способен перемещаться в продольном и поперечном направлениях по изучаемому каналу объекта одновременно или раздельно (рис.18). Это определяется схемой (программой) действий микроманипулятора или спецификой непосредственно объекта изучения.
Возможная комплексная траектория движения микроманипулятора по внутренней поверхности канала приведена на рис.18.
Способ передвижения микроманипулятора задан последовательным переключением с заданной частотой полярности сферических элементов сторон. Это переключение выполняется в направлении от контактирующей с изучаемой поверхностью стороны модуля к следующей за ней. Направления переключений допустимо задавать по ходу или против хода часовой стрелки (рис.19) у каждого модуля. Это объясняется тем, что к каждой стороне шестиугольника модуля прилегает по две стороны и процесс выбора направления движения и, следовательно, управления этим процессом не имеет ограничений.
|
 Рисунок 18 - Комплексная траектория движения микроманипулятора во внутренней
Рисунок 18 - Комплексная траектория движения микроманипулятора во внутренней
полости канала
|
Диапазон данной возможности вписывается в максимальный телесный угол сферы, что приближается к идеалу в решении.
Обнаруженная взаимосвязь информационного показателя микроманипулятора с параметрами его кинематики и конструкции может быть формализована через соотношения вида ![]() и
и  , где
, где ![]() – количество сторон рамки, шт.,
– количество сторон рамки, шт., ![]() ;
; ![]() - количество рамок, шт., (
- количество рамок, шт., ( ;
; ![]() – шаговый угол, град.,
– шаговый угол, град., ![]() ; – количество сферических элементов на стороне рамки, шт.,
; – количество сферических элементов на стороне рамки, шт., ![]() ;
; ![]() - количество центральных сферических элементов, шт.,
- количество центральных сферических элементов, шт., ![]() при
при ![]() ;
; ![]() – количество совмещенных сферических элементов у рамки, шт.,
– количество совмещенных сферических элементов у рамки, шт., ![]() при
при ![]() ;
; ![]() – общее количество сферических элементов, шт.,
– общее количество сферических элементов, шт.,![]() - информационная емкость конструкции микроманипулятора, байт;
- информационная емкость конструкции микроманипулятора, байт; ![]() - количество бит информации в одном байте.
- количество бит информации в одном байте.
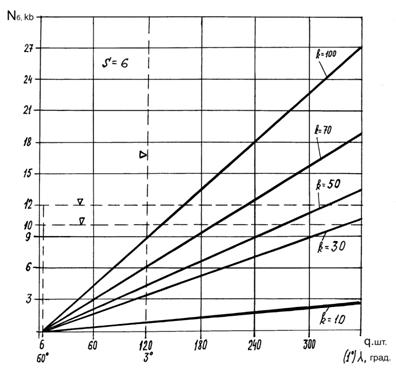
Итоги расчета, выполненного по данной методике, сведены в таблицу и графически отражены на рис.20. Знаком ▼ на графике (рис.20) отмечены границы предельно допустимых кинематических и конструктивных параметров микроманипулятора, необходимые для задания относительно достаточной информационной емкости конструкции.
Следует отметить, что при ![]() у микроманипулятора реализуется гомогенная структура, а при ином количестве сторон рамки, например, при
у микроманипулятора реализуется гомогенная структура, а при ином количестве сторон рамки, например, при ![]() - гетерогенная. В первом варианте очевидное конструктивное разнообразие решений найдет объективно закономерное распространение.
- гетерогенная. В первом варианте очевидное конструктивное разнообразие решений найдет объективно закономерное распространение.
Информационная емкость конструкции микроманипулятора
S | q | k | N | N+12 | ~ Nб |
6 | 60 | 10 | 360 | 372 | 48 |
30 | 1080 | 1092 | 136 | ||
50 | 1800 | 1812 | 224 | ||
70 | 2520 | 2532 | 316 | ||
100 | 3600 | 3612 | 451 | ||
120 | 10 | 7200 | 7212 | 901 | |
30 | 21600 | 21612 | 2701 | ||
50 | 36000 | 36012 | 4501 | ||
70 | 50400 | 50412 | 6301 | ||
100 | 72000 | 72012 | 9000 | ||
360 | 10 | 21600 | 21612 | 2701 | |
30 | 84800 | 84812 | 10601 | ||
50 | 108000 | 108012 | 13501 | ||
70 | 151200 | 151212 | 18901 | ||
100 | 216000 | 216012 | 27010 |
|

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
