

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
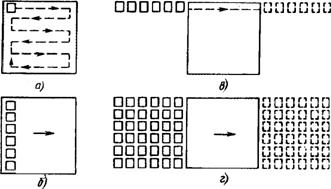
Рис. 7.1. Способы сканирования: а – одноэлементное;
б – параллельное; в – последовательное; г – комбинированное
При параллельном сканировании (рис. 7.1,б) все поле просматривается одновременно по горизонтальным строкам, например путем перемещения линейки фотоприемников, ориентированной перпендикулярно направлению сканирования, отмеченному на рис. 7.1,б стрелкой. При этом быстродействие системы повышается, так как выходные сигналы всех строк обрабатываются одновременно. Недостатками способа являются: заметное влияние неоднородности параметров отдельных элементов, например чувствительности отдельных площадок многоэлементного приемника, что приводит к искажению получаемой информации; ограничение разрешающей способности по вертикали размером одного элемента, дороговизна и сложность многоэлементных приемников, необходимость иметь предварительные усилители для каждого элемента, а также коммутирующее устройство.
При последовательном сканировании (рис. 7.1,в) линейка элементов (например, приемников) ориентирована параллельно направлению сканирования. Каждую точку поля обзора просматривают все элементы. Сигналы от отдельных элементов поступают в линию задержки, а затем суммируются на ее выходе (рис. 7.2). Здесь возможно осреднение сигналов, т. е. заметное ослабление влияния разброса параметров отдельных элементов. По сравнению со схемой параллельного сканирования здесь может быть достигнуто большее разрешение. Однако и этой схеме свойственны такие недостатки, как дороговизна многоэлементного приемника, необходимость усложнения электронной схемы.
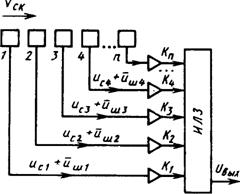
Рис. 7.2. Схема обработки сигналов при последовательном сканировании
Ряд схем с последовательным сканированием, осуществляемым электрически управляемыми сигналами и используемым для анализа изображений, был рассмотрен в §6.9.
В схеме с последовательным сканированием выигрыш в отношении сигнал/шум, имеющий место при накоплении п сигналов, пропорционален корню квадратному из числа элементов п. Действительно, если на выходе интегрирующей линии задержки (ИЛЗ) сигнал Uвых равен сумме
где Ki – коэффициент усиления i-го канала предусилителя, то отношение сигнал-шум mS при K1 » K2 » …» Kn » K, uc1 » uc 2 »…» ucn » uc, ![]() будет
будет
т. е. в ![]() бо́льшим, чем для схемы с одним элементом
бо́льшим, чем для схемы с одним элементом  .
.
Как уже отмечалось в §6.8, реализовать этот метод временно́й задержки и интегрирования (накопления) удобно с помощью современных мозаичных и матричных приемников, например ПЗС.
К недостаткам систем с последовательным сканированием по сравнению со схемой параллельного сканирования относится необходимость увеличивать амплитуду сканирования, чтобы обеспечить просмотр каждой точки поля всеми элементами и, как следствие этого, необходимость увеличивать скорость сканирования при заданном быстродействии всей системы.
Обоснованное сравнение способов параллельного и последовательного сканирования можно проделать, если сопоставить достигаемую в каждой схеме обнаружительную способность или пороговую чувствительность в полосе частот, свойственной каждой из них. Необходимые для этого сопоставления предпосылки могут быть получены из энергетического расчета (см. § 12.2). Ниже будут даны формулы для расчета некоторых параметров таких систем.
При комбинированном (параллельно-последовательном) сканировании (см. рис. 7.1, г) используется матрица элементов (чаще всего приемников). Здесь объединяются достоинства двух предыдущих способов, как повышение чувствительности и быстродействия, однако заметно усложняется схема обработки сигналов и увеличивается стоимость всей системы, главным образом, за счет резкого удорожания приемника. В этом случае достаточно просто можно осуществить автономно-покадровый способ сканирования, при котором внутри матрицы, образующей малый («автономный») кадр, постоянно осуществляется сканирование, а сам «автономный» кадр просматривает поле обзора («большой» кадр). Этот метод позволяет достичь высокого разрешения при просмотре очень больших полей обзора, особенно при решении трудных задач обнаружения сложных объектов или группы простых.
Сканирование может осуществляться как в пространстве предметов, так и в пространстве изображений. Примером реализации первого случая служит узкопольная система на подвижном основании, перемещающем ее так, чтобы в угловое поле объектива последовательно попадало излучение от различных участков поля обзора. Во втором случае плоскость изображения поля обзора последовательно просматривается с помощью узкой полевой диафрагмы или осуществляется деление этой плоскости на элементарные участки, например, путем использования многоэлементного приемника излучения с последующим «опросом» отдельных элементов развертывающими электронными устройствами.
Для некоторых ОЭП важен тот факт, что многоэлементные сканирующие системы обеспечивают пространственную фильтрацию сигнала, например, позволяют ослаблять влияние постоянного фона в поле обзора. Подробнее об этом см. в гл. 11.
Нужно помнить, что при использовании многоэлементных сканирующих систем возможно наложение пространственных частот. В пределах элемента приемника высокочастотные составляющие спектра изображения (мелкоразмерные детали изображения) сглаживаются, осредняются, т. е. при таком сканировании осуществляется усредняющая выборка.
Конструктивные особенности сканирующих систем, различающихся по физической сущности явлений, лежащих в основе их действия, и по способу развертки исследуемого поля, будут рассмотрены в последующих параграфах этой главы.
7.2. Параметры и характеристики сканирующих систем
К числу основных параметров и характеристик сканирующей системы относятся: поле обзора и мгновенное угловое поле; вероятность просмотра всего поля обзора в заданное время; период сканирования Тк или частота сканирования fс; траектория сканирования; полоса частот Df сигнала, образующегося при сканировании; коэффициент сканирования hс; число и размеры элементов разложения поля обзора.
Периодом сканирования (временем кадра) Тк называется время, необходимое для просмотра заданного поля обзора и возврата мгновенного углового поля (элемента разложения) в исходное положение. Отношение времени, требуемого для просмотра самого поля обзора, к значению Tк называется иногда коэффициентом сканирования hс. При уменьшении времени возврата системы в исходное положение hс увеличивается. Этот коэффициент во многом характеризует как быстродействие сканирующей системы, так и ее конструктивное совершенство. Потери времени на возврат, определяющие hс, составляют порой более половины Tк.
Иногда помимо периода сканирования по всему кадру Tк рассматривают периоды сканирования по строкам Тc, из которых состоит кадр.
Частоту сканирования обычно определяют как fс=1/Tк. Отношение активной части периода сканирования, т. е. hсTк, к числу элементов разложения п обычно называют временем пребывания tэ.
Выбор закона и траектории сканирования для вновь проектируемого ОЭП часто является весьма сложной и ответственной задачей. Эта задача может быть решена различными путями в зависимости от того, носит закон сканирования и поиска объектов в поле обзора случайный характер или он регулярный (детерминированный). Здесь многое зависит от элементной базы, которой располагает разработчик ОЭП, от условий работы прибора, однако имеются и некоторые общие рекомендации по выбору траектории сканирования, базирующиеся на ряде достаточно общих критериев. Эти критерии связаны со статистическими критериями качества ОЭП, например, с вероятностью обнаружения объекта в поле обзора (см. §13.1), но в то же время они достаточно специфичны [13].
Выбор оптимальной траектории сканирования, размера мгновенного углового поля, скорости сканирования зависит от статистических свойств просматриваемого поля сигналов (поля обзора) и выбранного критерия эффективности сканирования. Такими критериями могут быть вероятность обнаружения объекта, время, необходимое для просмотра поля или для обнаружения искомого объекта, а иногда и др.
Выбор критерия оптимальности (максимум вероятности обнаружения, минимум времени просмотра и т. п.) и параметров сканирующей системы, его обеспечивающих, в значительной степени зависит от априорных сведений о поле обзора. Если эти сведения отсутствуют, то обычно считают, что наилучшей траекторией сканирования является та, которая обеспечивает равновероятный и равномерный по времени просмотр поля обзора, например строчная траектория (рис. 7.3,a). Однако, если известно, что объект с большой вероятностью может находиться в определенном участке поля обзора, то более рациональным является выбор таких траекторий, при которых предполагаемая зона нахождения объекта просматривается более подробно или чаще, чем другие зоны поля обзора. Например, если заранее известно, что объект с большой вероятностью может находиться в центре поля, то целесообразно выбрать розеточную траекторию (рис. 7.3,в).
Распространенным способом получения спиральных и розеточных траекторий является двойное вращение мгновенного углового поля (вращательно-вращательное движение) – со скоростью n1 вокруг некоторой оси, которая в свою очередь вращается со скоростью n2 вокруг другой, неподвижной оси. При ni < n2 образуется спиральная развертка поля обзора, а при n1 > n2 – розеточная, например гипоциклоидальная (см. рис. 7.3, г).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 |
