

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Если плотности вероятности случайных функций, описывающих смесь сигнала и помех и только помехи, обозначить через рx=px(x) и рп=pn(x) соответственно, то условная вероятность правильного обнаружения определяется как
 (13.1)
(13.1)
а условная вероятность пропуска сигнала
В отсутствие сигнала можно принять ложное решение, оцениваемое условной вероятностью ложной тревоги:
 (13.2)
(13.2)
Условная вероятность правильного необнаружения
Графическая интерпретация этих выражений представлена на рис. 13.1. Площади кривых pn и рx, описывающих законы распределения вероятностей помех и смеси сигнала с помехами и ограниченных с одной стороны выбранным значением порога срабатывания х0, равны вероятностям F, 1-F, D и 1-D. Величина ![]() характеризует математическое ожидание помех, а
характеризует математическое ожидание помех, а ![]() – математическое ожидание смеси сигнала s с помехами п. Иногда в качестве
– математическое ожидание смеси сигнала s с помехами п. Иногда в качестве ![]() принимают некоторое среднее значение сигнала, например потока, приходящего на входной зрачок ОЭП.
принимают некоторое среднее значение сигнала, например потока, приходящего на входной зрачок ОЭП.
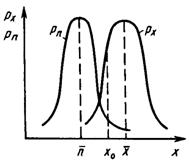
Рис.13.1. Условные плотности вероятности помехи и смеси сигнала с помехой
Очевидно, что чем больше х0, тем меньше вероятность ложной тревоги F. Однако при этом возрастает вероятность пропуска сигнала 1–D, а кроме того, необходимо обеспечить выполнение более высоких требований к параметрам ОЭП, например увеличить мощность источника сигнала, увеличить площадь входного зрачка, чтобы сместить значение ![]() , т. е.
, т. е. ![]() и всю кривую вправо по оси х. При больших сигналах уровень срабатывания х0 выбирают достаточно высоким; при слабых сигналах значение х0 приближается к
и всю кривую вправо по оси х. При больших сигналах уровень срабатывания х0 выбирают достаточно высоким; при слабых сигналах значение х0 приближается к ![]() . Выбор величины х0 связан с необходимостью обеспечить требуемое отношение сигнал-помеха, о чем будет сказано ниже.
. Выбор величины х0 связан с необходимостью обеспечить требуемое отношение сигнал-помеха, о чем будет сказано ниже.
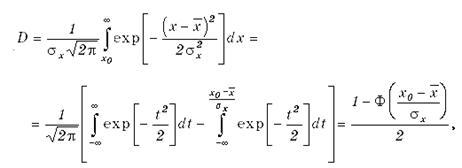
С учетом приведенных выше формул для полностью известного (детерминированного) полезного сигнала и гауссовской помехи можно записать
![]()
![]()

где sn и sx – средние квадратические значения п и х; х0 – порог обнаружения;
![]() и
и ![]() – математические ожидания (средние значения) х и n;
– математические ожидания (средние значения) х и n; 
 – интеграл вероятностей.
– интеграл вероятностей.
Если обозначить отношение пикового сигнала s к среднему квадратическому значению случайной составляющей смеси сигнала и помех sx через m (отношение сигнал-шум), а отношение разности порога срабатывания х0 и среднего значения помехи ![]() к sx через mп (отношение порог-шум), то можно записать
к sx через mп (отношение порог-шум), то можно записать
 ,
,
где m0=m - mп.
Для полезного сигнала в виде гауссовской случайной функции с дисперсией ss2 и математическим ожиданием ![]() = и аддитивной гауссовской помехи с
= и аддитивной гауссовской помехи с ![]() = 0
= 0
![]()

а величина F определяется выражением (13.4).
При заданных или известных величинах ![]() и sn вероятность ложной тревоги F зависит только от величины x0, но не от значения сигнала. Это значит, что величину x0 можно выбирать непосредственно по заданной вероятности ложной тревоги F. Вероятность правильного обнаружения D также зависит от x0, т. е. может быть выражена как функция вероятности F. В то же время вероятность D является функцией не только x0 (т. е. одновременно и F), но и функцией относительной величины полезного сигнала m =
и sn вероятность ложной тревоги F зависит только от величины x0, но не от значения сигнала. Это значит, что величину x0 можно выбирать непосредственно по заданной вероятности ложной тревоги F. Вероятность правильного обнаружения D также зависит от x0, т. е. может быть выражена как функция вероятности F. В то же время вероятность D является функцией не только x0 (т. е. одновременно и F), но и функцией относительной величины полезного сигнала m = ![]() /sx, если считать, что величина сигнала близка к среднему значению x, т. е.
/sx, если считать, что величина сигнала близка к среднему значению x, т. е. ![]() »
»![]() . Зависимости вероятности правильного обнаружения от F и m принято называть характеристиками обнаружения или рабочими характеристиками системы обнаружения.
. Зависимости вероятности правильного обнаружения от F и m принято называть характеристиками обнаружения или рабочими характеристиками системы обнаружения.
Величину m = ![]() /sx иногда называют параметром обнаружения. В специальной литературе значения m рассчитаны для сигналов и помех различного вида. В качестве примера на рис. 13.2 приведены характеристики обнаружения D=f(F, m) для случая гауссовской помехи и сигналов с полностью определенными параметрами (штрих-пунктирные линии) и со случайной амплитудой и начальной фазой (сплошные линии).
/sx иногда называют параметром обнаружения. В специальной литературе значения m рассчитаны для сигналов и помех различного вида. В качестве примера на рис. 13.2 приведены характеристики обнаружения D=f(F, m) для случая гауссовской помехи и сигналов с полностью определенными параметрами (штрих-пунктирные линии) и со случайной амплитудой и начальной фазой (сплошные линии).
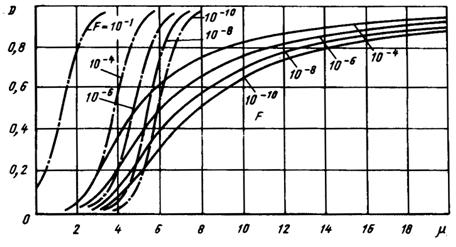
Рис.13.2. Характеристики обнаружения
Законы распределения вероятностей сигналов от наблюдаемых или контролируемых объектов, а также помех и шумов иногда принято выражать в относительных единицах, причем часто абсолютные значения х, п, s нормируют к среднему квадратическому значению шума приемника sп, что объясняется зависимостью sп от вида приемника, размера его площади, полосы пропускания системы и ряда других конструктивных факторов, неизвестных на первых этапах энергетического расчета, а также тем, что именно шум приемника чаще всего определяет предельные возможности всего ОЭП.
Таким образом, рассчитав характеристики обнаружения для конкретных условий работы ОЭП или воспользовавшись уже известными характеристиками, находим по ним значение m, при котором обеспечиваются заданные значения D и F, а также требуемое отношение правдоподобия, т. е. решаем задачу, поставленную на третьем этапе обобщенной методики энергетического расчета ОЭП (см. § 12.2).
Для многих измерительных и следящих ОЭП выбор отношения сигнал-шум зависит от требований к их точности. Например, для оптико-электронной измерительной или следящей системы, рассмотренной в § 10.1, величину m можно найти по формуле (10.6):
 ,
,
если известны заданная средняя квадратическая погрешность измерения или слежения sa, линейная зона статической характеристики aл и передаточный коэффициент цепи обратной связи Kз.
13.2. Расчет отношения сигнал-шум на выходе системы первичной обработки информации
Рассмотрим достаточно простую и удобную для ряда практических применений методику расчета отношения сигнал-шум на выходе приемника.
Если на вход ОЭП поступает сигнал в виде потока излучения Фс(l), являющегося функцией длины волны излучения l, то сигнал после его прохождения через оптическую систему, модулятор-анализатор и приемник излучения может быть представлен в виде
 . (13.6)
. (13.6)
где kм – коэффициент, учитывающий видоизменения и, в частности, потери мощности сигнала за счет модуляции потока, и преобразования сигнала в электронных звеньях ОЭП (см. § 8.3); to(l) – спектральная характеристика пропускания всей оптической системы, включая и модулятор; ![]() – спектральная характеристика вольтовой чувствительности приемника излучения для центральной частоты fт полосы пропускания электронного тракта, при которой проводилась паспортизация приемника, т. е. определение sυ. Значения Фс(l) и
– спектральная характеристика вольтовой чувствительности приемника излучения для центральной частоты fт полосы пропускания электронного тракта, при которой проводилась паспортизация приемника, т. е. определение sυ. Значения Фс(l) и ![]() в (13.6) берутся обычно в абсолютных единицах.
в (13.6) берутся обычно в абсолютных единицах.
Среднее квадратическое значение шума на выходе приемника излучения можно найти, если известны спектральные плотности мощности внутренних шумов jш(f) и внешних шумов Wa(f), приведенных ко входу приемника:
 . (13.7)
. (13.7)
Реальные пределы интегрирования в (13.6) и (13.7) определяются полосой пропускания Df конкретного ОЭП.
Отношение сигнал-шум на выходе приемника в общем виде
 (13.8)
(13.8)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 |
