
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3. Единичный вектор (орт)
Запишем:![]() . Рассмотрим вектор
. Рассмотрим вектор ![]() . Этот вектор имеет направление, совпадающее с направлением вектора
. Этот вектор имеет направление, совпадающее с направлением вектора ![]() , т. к.
, т. к. ![]() . Найдем его модуль:
. Найдем его модуль: ![]()
Вектор, модуль которого равен единице, называется единичным вектором или ортом. Единичный вектор обозначается так:  Направление вектора
Направление вектора ![]() совпадает с направлением вектора
совпадает с направлением вектора ![]() . Единичный вектор можно использовать для задания вектора
. Единичный вектор можно использовать для задания вектора ![]() . Например,
. Например,  .
.
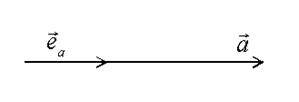
Рис. 5 - Единичный вектор
4. Проекция вектора на ось
Выберем в пространстве прямую, зададим ее направление и назовем осью ![]() . Пусть вектор
. Пусть вектор ![]() и ось
и ось ![]() образуют угол
образуют угол ![]() .
.
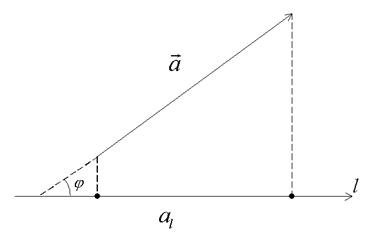
Рис. 6 - Проекция вектора на ось
Проекцией вектора ![]() на ось
на ось ![]() называется алгебраическая величина, равная произведению модуля вектора на угол между направлениями вектора и оси:
называется алгебраическая величина, равная произведению модуля вектора на угол между направлениями вектора и оси: 
5. Разложение вектора на составляющие
Всякий вектор можно представить в виде суммы двух или более других векторов. Например, ![]() .
.
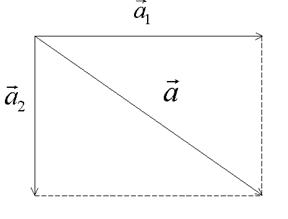
Рис. 7 - Разложение вектора на составляющие
Векторы ![]() и
и ![]() называются составляющими вектора
называются составляющими вектора ![]() или компонентами вектора. Такое представление называется разложением вектора на составляющие.
или компонентами вектора. Такое представление называется разложением вектора на составляющие.
6. Скалярное произведение векторов
Скалярным произведением двух векторов называется скаляр, равный произведению модулей этих векторов на косинус угла между векторами: ![]() ,
, ![]() .
.
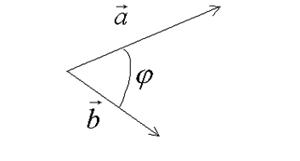
Рис. 8 - Скалярное произведение
Умножим вектор ![]() сам на себя скалярно:
сам на себя скалярно: ![]() . Квадрат вектора равен квадрату модуля этого вектора.
. Квадрат вектора равен квадрату модуля этого вектора.
7. Векторное произведение векторов
Векторным произведением векторов ![]() и
и ![]() называется вектор
называется вектор ![]() , удовлетворяющий следующим условиям:
, удовлетворяющий следующим условиям:
1. вектор равен:  ,
,
2. модуль вектора ![]() равен произведению модулей векторов
равен произведению модулей векторов ![]() и
и ![]() на синус угла между ними:
на синус угла между ними:
3. вектор ![]() перпендикулярен плоскости, в которой лежат векторы
перпендикулярен плоскости, в которой лежат векторы ![]() и
и ![]() ,
,
4. из конца вектора ![]() поворот от первого сомножителя ко второму сомножителю по кратчайшему пути должен быть виден происходящим против часовой стрелки.
поворот от первого сомножителя ко второму сомножителю по кратчайшему пути должен быть виден происходящим против часовой стрелки.
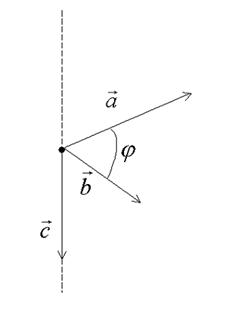
Рис. 9 - Векторное произведение
Декартова система координат
Декартова прямоугольная система координат образована тремя взаимно-перпендикулярными, пересекающимися в одной точке O жесткими стержнями. Каждый стержень, с нанесенными на него масштабными метками, образует координатную ось:  . Стрелки указывают положительное направление оси. Точка пересечения осей O называется началом системы координат.
. Стрелки указывают положительное направление оси. Точка пересечения осей O называется началом системы координат.
Возьмем некоторую точку М и проведем в нее из начала координат вектор ![]() .
.
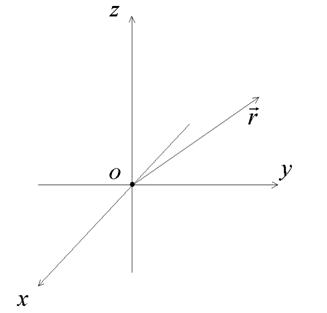
Рис. 10 - Декартова система координат
Вектор, проведенный из начала координат в некоторую точку, называется радиус-вектором этой точки: ![]() Конец радиус-вектора
Конец радиус-вектора ![]() совпадает с данной точкой.
совпадает с данной точкой.
Обозначим координаты точки М: ![]() . Модуль радиус-вектора оказывается равен:
. Модуль радиус-вектора оказывается равен:
![]() . Величины x, y, z есть координаты конца радиус-вектора или проекции радиус-вектора на оси координат. Обозначим единичные векторы (орты) декартовых осей:
. Величины x, y, z есть координаты конца радиус-вектора или проекции радиус-вектора на оси координат. Обозначим единичные векторы (орты) декартовых осей: ![]() . Радиус-вектор точки с координатами x, y, z можно представить так:
. Радиус-вектор точки с координатами x, y, z можно представить так:  Векторы
Векторы ![]() взаимно перпендикулярны. Это означает, что:
взаимно перпендикулярны. Это означает, что:  В то же время, очевидно что,
В то же время, очевидно что, ![]()
Функция, производная, интеграл
Если каждому значению величины ![]() можно сопоставить значение величины
можно сопоставить значение величины ![]() , то
, то ![]() и
и ![]() связаны функциональной зависимостью или
связаны функциональной зависимостью или ![]() есть функция аргумента
есть функция аргумента ![]() :
: ![]() .
.
Возьмем два значения аргумента  и
и  . Величина
. Величина  называется приращением аргумента . Вычислим приращение функции:
называется приращением аргумента . Вычислим приращение функции:  . Составим отношение:
. Составим отношение:  . Значение отношения
. Значение отношения  в общем случае зависит от значения . Будем неограниченно уменьшать приращение . При этом, значение отношения сначала будет изменяться достаточно сильно, затем изменение значения может уменьшаться, приближаясь (стремясь) к нулю. Само отношение при этом стремится к производной функции по аргументу:
в общем случае зависит от значения . Будем неограниченно уменьшать приращение . При этом, значение отношения сначала будет изменяться достаточно сильно, затем изменение значения может уменьшаться, приближаясь (стремясь) к нулю. Само отношение при этом стремится к производной функции по аргументу: 
Производной функции ![]() по аргументу
по аргументу ![]() называется предел, к которому стремится отношение приращения функции
называется предел, к которому стремится отношение приращения функции ![]() к приращению аргумента
к приращению аргумента ![]() при неограниченном уменьшении приращения аргумента.
при неограниченном уменьшении приращения аргумента.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
