

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (29) |
Здесь параметр ![]() обозначает номер локальной итерации. В случае, когда
обозначает номер локальной итерации. В случае, когда ![]() является линейной функцией, а релаксационный параметр задается равенством
является линейной функцией, а релаксационный параметр задается равенством ![]() , формула (29) задает нормальный проектор на плоскость
, формула (29) задает нормальный проектор на плоскость ![]() . В общем случае итерации (29) нужно повторять до тех пор, пока уклонение точки
. В общем случае итерации (29) нужно повторять до тех пор, пока уклонение точки ![]() от
от ![]() не будет превышать порога
не будет превышать порога ![]() . На практике это сводится к проверке справедливости неравенства
. На практике это сводится к проверке справедливости неравенства
| (30) |
где величину ![]() можно рассматривать как погрешность задания геометрии.
можно рассматривать как погрешность задания геометрии.
Градиент ![]() функции
функции ![]() составлен из
составлен из ![]() -мерных векторов
-мерных векторов ![]() . Матрица Гессе
. Матрица Гессе ![]() функции
функции ![]() составляется из
составляется из ![]() матриц
матриц ![]() , причем матрица
, причем матрица ![]() помещается на место пересечения
помещается на место пересечения ![]() -й блочной строки и
-й блочной строки и ![]() -го блочного столбца.
-го блочного столбца.
Метода Ньютона - Рафсона для нахождения стационарной точки сеточного функционала без учета проскальзывания можно записать следующим образом:
| (31) |
| (32) |
Обозначим через ![]() матрицу размера
матрицу размера ![]() , первыми двумя столбцами которой являются векторы
, первыми двумя столбцами которой являются векторы ![]() , вычисленные в точке
, вычисленные в точке ![]() , а последний столбец равен нулю. Если же индекс
, а последний столбец равен нулю. Если же индекс ![]() , то положим
, то положим ![]() .
.
Для того, чтобы включить условие проскальзывания в итерационную схему (31), (32), умножим равенство (31) слева на ![]() и учтем тот факт, что
и учтем тот факт, что ![]() при
при ![]() удовлетворяет равенству (28), т. е.
удовлетворяет равенству (28), т. е.
так что в линейной системе (31) в качестве неизвестного вектора вместо ![]() можно брать двумерный вектор
можно брать двумерный вектор ![]() . Обозначим через
. Обозначим через ![]() вектор приращений, равный
вектор приращений, равный ![]() при
при ![]() и равный
и равный ![]() при
при ![]() , так что
, так что ![]() . Используя введенные обозначения, можно записать итерационный метод нахождения стационарной точки функции
. Используя введенные обозначения, можно записать итерационный метод нахождения стационарной точки функции ![]() .
.
| (33) |
| (34) |
Равенство (34) можно записать как
![]()
где оператор ![]() проекции на границу области совпадает с введенным в формуле (29). Итерационный параметр
проекции на границу области совпадает с введенным в формуле (29). Итерационный параметр ![]() находится в результате приближенного решения одномерной задачи минимизации
находится в результате приближенного решения одномерной задачи минимизации
![]()
Для решения этой одномерной задачи используется простейший метод деления пополам. Использование известной схемы Армийо для решения этой задачи остается под вопросом, поскольку функция ![]() является барьерной, т. е. не является липшицевой.
является барьерной, т. е. не является липшицевой.
Для того, чтобы из общих формул (33) получить метод, аналогичный известному итерационному барьерному методу Иваненко-Чарахчьяна, 1988, нужно положить ![]() при
при ![]() . При этом для нахождения
. При этом для нахождения ![]() нужно решать независимые линейные системы размерности
нужно решать независимые линейные системы размерности ![]() в скользящих точках и размерности
в скользящих точках и размерности ![]() в остальных точках сетки.
в остальных точках сетки.
Для того, чтобы из (33) получить неявный метод, предложенный в (Гаранжа, 2000), в матрицах ![]() надо отбросить все внедиагональные члены. В этом случае линейная система (33) распадется на
надо отбросить все внедиагональные члены. В этом случае линейная система (33) распадется на ![]() независимых линейных системы относительно векторов
независимых линейных системы относительно векторов ![]() , которые получаются из
, которые получаются из ![]() при помощи равенств
при помощи равенств
![]()
Вариационный метод можно использовать и в том случае, когда алгебраический объем некоторых тетраэдров в начальной сетке равен нулю или отрицателен. При наличии подобных ``вывернутых'' тетраэдров оказался эффективным метод распутывания сеток, предложенный в работе (Гаранжа, Капорин, 1999) . Идея этого метода основана на том, что детерминант ![]() в знаменателе формулы (23) заменяется на величину
в знаменателе формулы (23) заменяется на величину
При этом исправление сетки достигается за счет продолжения по параметру ![]() от больших значений до нуля.
от больших значений до нуля.
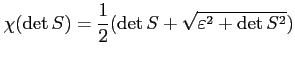
Построение начальной допустимой деформации играет большую роль в сложных прикладных задачах, для которых невозможно построить допустимое начальное приближение аналитически или вручную.
Численные эксперименты показали, что в тех случаях, когда задача построения начальной деформации является достаточно жесткой ввиду сложной геометрии области, а число элементов в сетке достаточно велико, явные методы градиентного спуска оказываются неспособны эту задачу решить. С другой стороны, неявные методы достаточно эффективны и позволяют строить допустимую упругую деформацию, стартуя с произвольного начально приближения. Их основным недостатком является является использование большого объема оперативной памяти, что препятствует их применению в случае весьма подробных трехмерных сеток.
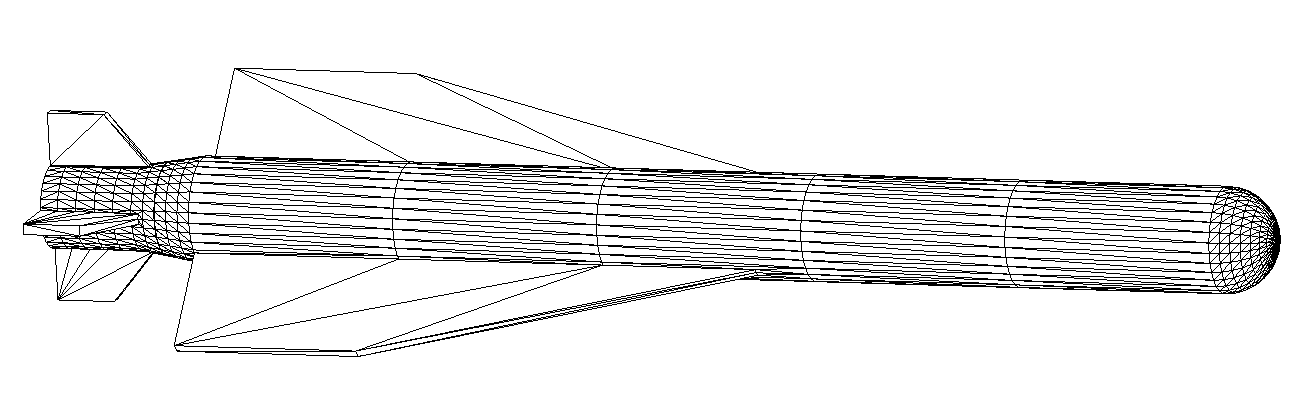
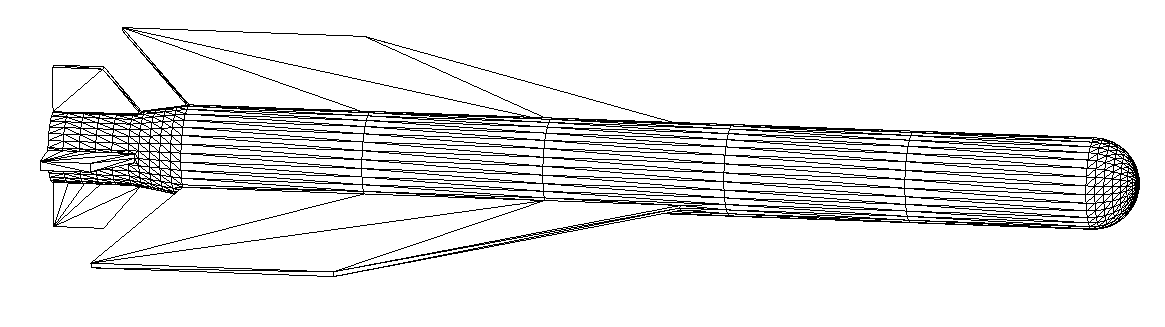
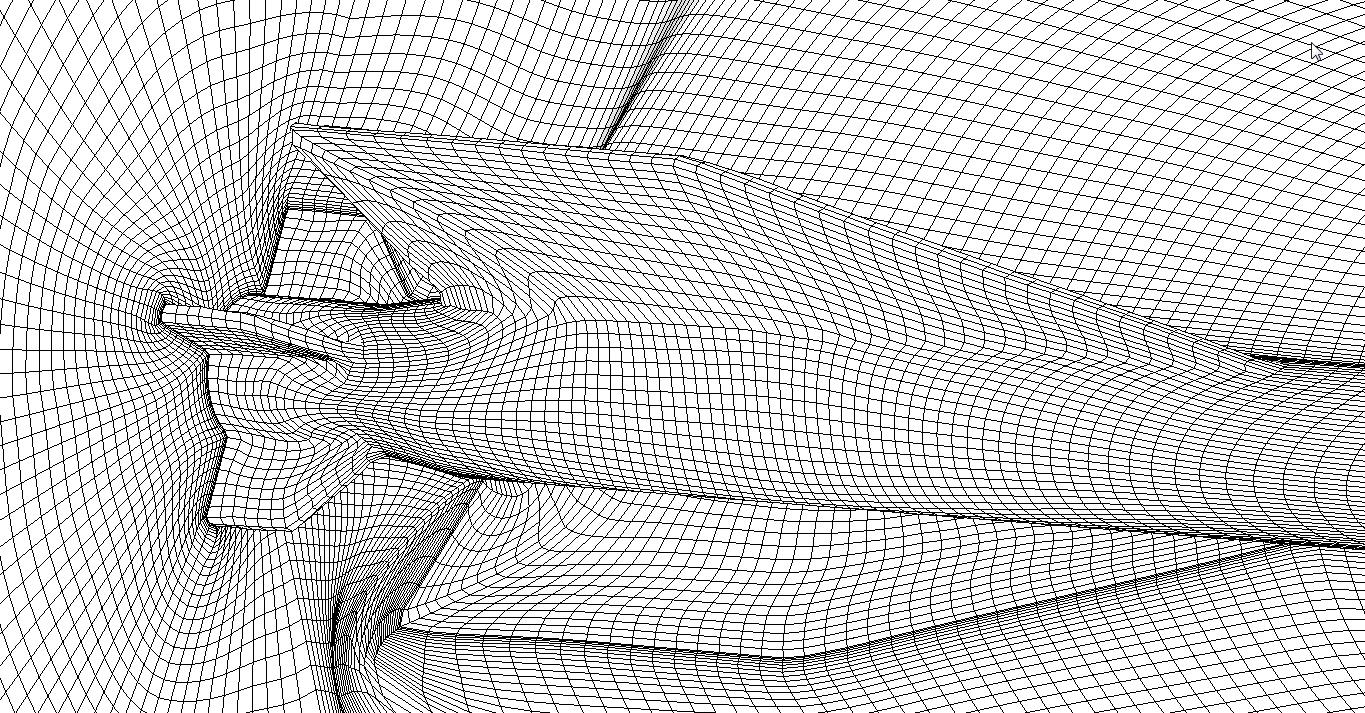
Рис. 1

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
